Projektbeispiel: Optimal Motion Planning
SCARA robots are widely used in:
- industry for assembly tasks, packaging applications or pick-and-place operations;
- laboratories for handling liquids or working in corrosive environment;
- surgery for boring holes in the femur during hip or knee replacement.
The robots are appreciated for their precision, robustness, speed and small footprint. An excellent planning of their motion is therefore essential.
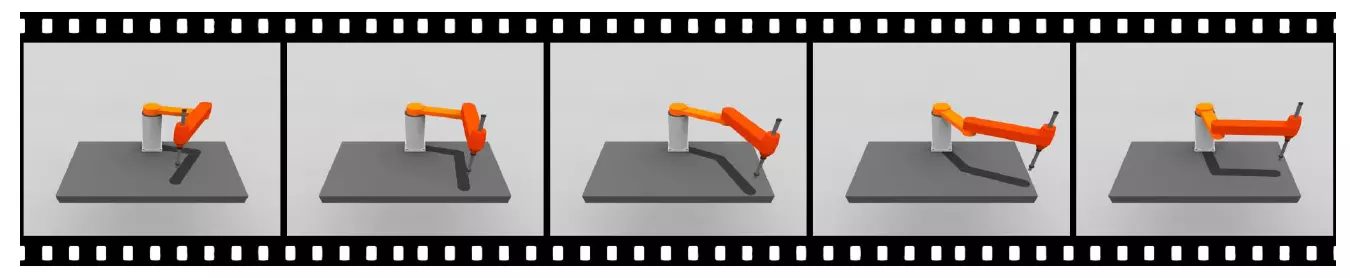
We consider the classical two-link SCARA manipulator and place it in a rectangular domain. This domain is included in the work envelope of the robot and represents a restrictive area for the footprint of the robot.
The two-link manipulator is asked to move between two given positions in the domain, while
- moving along a smooth and collision-free trajectory as fast as possible,
- following the equations of motion,
- respecting the domain boundaries,
- observing the given physical limits on the joint angles, joint velocities, torques and velocity of the end effector.
We have developed a software which computes the fastest trajectory that fulfills all the above-mentioned requirements. The computed trajectory is smooth, mechanically feasible and can be perfectly tracked by the feedback-controller of the robot. Moreover, the small computational time of the software enables a real-time computation of the trajectories on an embedded CPU.