Robotik & Automation
Schwerpunktthemen
Robotik und Automatisierungstechnik ermöglichen den weitgehend autonomen Betrieb von Maschinen und Anlagen. Damit entlasten sie den Menschen in der modernen Industriegesellschaft von schweren körperlichen, monotonen und gesundheitsschädigenden Arbeiten. Forschung in Robotik und Automatisierungstechnik trägt ausserdem dazu bei, Energiekosten zu senken und die Wirtschaftlichkeit industrieller Prozesse zu steigern.
Der Fokus der Forschung bei "Robotik und Automatisierungstechnik" liegt auf der Entwicklung anspruchsvoller Anwendungen, die über den heutigen Industriestandard hinausgehen. Erfahrene, innovativ denkende und handelnde Mitarbeiter befassen sich in einem interdisziplinären Team mit der Realisierung intuitiver Mensch-Maschine-Interaktionsmöglichkeiten unter Berücksichtigung aller notwendigen Sicherheitsaspekte. Sie ermöglichen dadurch die Anwendung ihrer Forschung nicht nur in der industriellen Technik, sondern auch in unterschiedlichen Bereichen des täglichen Lebens.
Fokus
- Einsatz von Industrierobotern in Produktion und Automation
- Assistenz- und Serviceroboter
- Autonome Systeme
- Projektierung und Programmierung von (fehlersicheren) Steuerungen und Visualisierungen
- Steuern und regeln von elektrischen Antrieben mit SPS
- Dezentrale Automatisierungslösungen und Kommunikation mit verschiedenen Bussystemen
Projekte in Robotik & Automation
Melkroboter für den Schweizer Markt

Melkroboter sind schon seit über zwanzig Jahren in den Ställen der milchproduzierenden Landwirtschaft anzutreffen. Sie ermöglichen es den Bauern, ihre Tagesstruktur dank der Unterstützung der Roboter flexibler zu gestalten. Da die Kühe selber zum Roboter gehen und dort vollautomatisch gemolken werden beschränkt sich die Aufgabe des modernen Bauern auf die Kontrolle der Technik und des Tierwohls.
Automatische Schaltschrankverdrahtung in einer Mensch-Roboter Kooperation
Elektrische Schaltschränke z.B. für die Steuerung von grösseren Maschinen oder anderen technischen Anlagen sind meist sehr individuell auf den spezifischen Verwendungszweck ausgerichtet und sind deshalb nur in kleinen Serien baugleich. Diese Schaltschränke werden heute fast ausschliesslich manuell bestückt und verdrahtet. Trotz kleinen Serien und teilweise hoher Komplexität der Aufgabe besteht der Wunsch, Schaltschränke möglichst automatisch produzieren zu können.
Das IMS hat dafür ein Robotersystem entwickelt. Mehr Informationen zu diesem Projekt
Robo-Mate: Intelligentes, flexibles Exoskelett
Im Projekt Robo-Mate wird ein flexibles Exoskelett entwickelt, welches den Menschen bei schweren körperlichen Tätigkeiten (insbesondere im industriellen Umfeld) entlasten und somit Erkrankungen des Bewegungsapparates vorbeugen soll. Mehr Informationen zu diesem Projekt
EcoStrippAir: Wartungssystem für das Entfärben von Flugzeugen
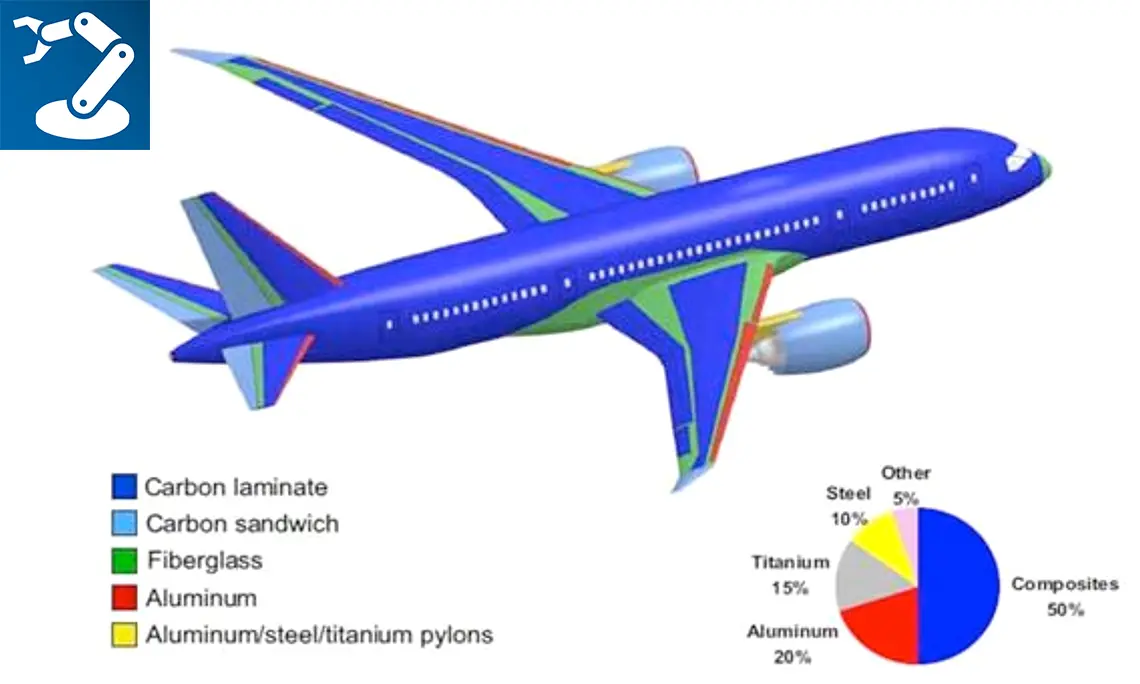
Im Projekt ECOSTRIPPAIR wird ein ökologisches Wartungssystem für Flugzeuge entwickelt, welches in der Lage ist, sehr effizient und schonend eine Flugzeugoberfläche ohne Chemikalien und zu 85% vollautomatisch von den verschiedenen Deckbelägen zu befreien. Auf diese Weise fallen harte Arbeitsbedingungen weg, die zu langfristigen Erkrankungen beim Personal führen, und es können kostspielige Schäden an Flugzeugoberflächen vermieden werden. Mehr Informationen zu diesem Projekt
ECHORD: Mensch-Roboter-Kooperation in der Flugzeugmontage

Im Rahmen des EU-Projekts ECHORD wurde am IMS das Experiment JILAS (Jig-Less Airplane Assembly in low volume production by enhanced human robot interaction) durchgeführt. Darin wurde die Zusammenarbeit zwischen Mensch und Industrieroboter am Beispiel einer Flugzeugrumpf-Komponentenmontage untersucht. Mehr Informationen zu diesem Projekt
ARFLEX: Offene Robotersteuerung

Im EU-Projekt ARFLEX (Adaptive Robots for Flexible Manufacturing Systems) unterstützte das IMS seine Industrie- und Forschungspartner bei der Entwicklung einer offenen Robotersteuerung. Ziel des Projekts war die Entwicklung eines Steuerungskonzepts, welches die Integration von intelligenten Sensoren in Roboterapplikationen vereinfachen sollte. Mehr Informationen zu diesem Projekt
AVERT: Sichere Beseitigung von verdächtigen Fahrzeugen
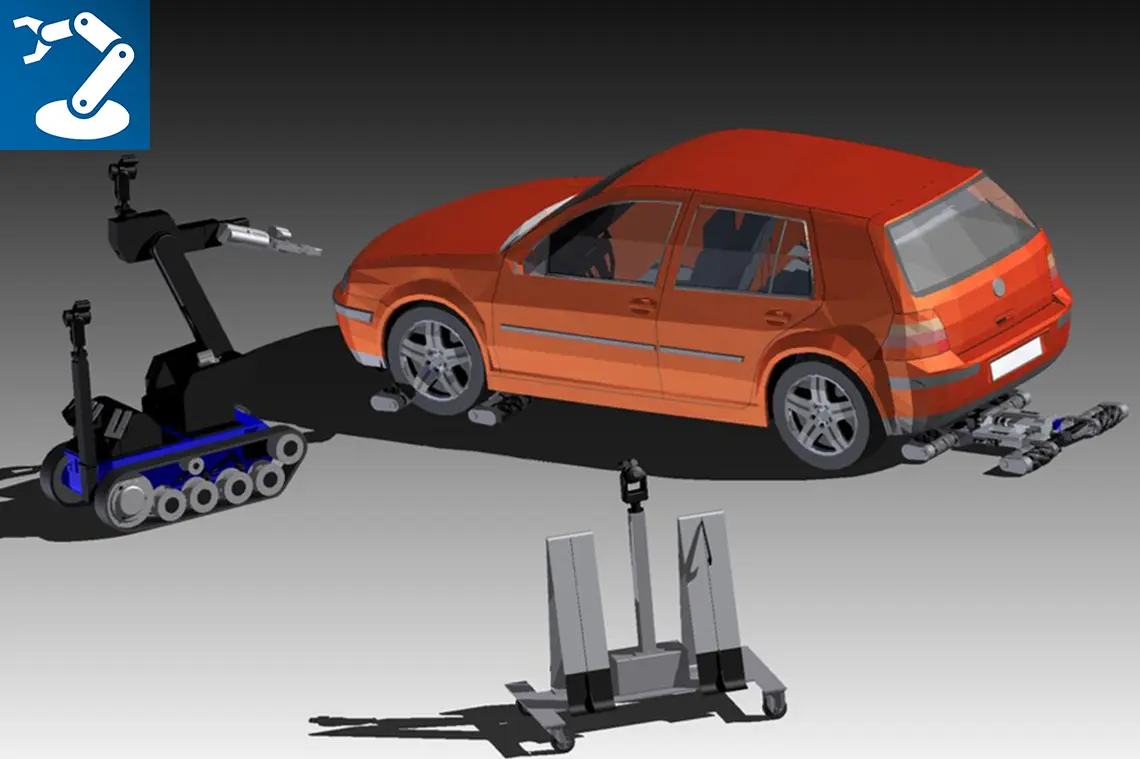
Das Autonomous Vehicle Emergency Recovery Tool (AVERT) ermöglicht die schnelle und sichere Beseitigung von blockierenden oder verdächtigen Fahrzeugen aus heiklen Positionen und schwer zugänglichen Räumen. Mehr Informationen zu diesem Projekt
Polizeiroboter

Das Institut für mechatronische Systeme hat ein bestehendes Robotersystem für Inspektion und Bombenentschärfung der Stadt- und Kantonspolizei Zürich modernisiert. Das Forensische Institut der Stadt- und Kantonspolizei Zürich (FOR) hat ein spezialisiertes Robotersystem entwickelt, welches zur Inspektion gefährlicher Gegenstände und der anfälligen Bombenentschärfung dient. Mehr Informationen zu diesem Projekt
Micro Delta: Schnelles und hochpräzises Robotersystem

Ziel des Projekts Micro Delta war die Entwicklung eines schnellen und präzisen Robotersystems. Der Roboter sollte handelsübliche Systeme in Genauigkeit und Geschwindigkeit deutlich übertreffen und gleichzeitig kostengünstig sein. Mehr Informationen zu diesem Projekt
RAAS: Roboterbasiertes Assistenzsystem im Schweissprozess

Ziel des roboterbasierten Assistenzsystems RAAS (Robot Assisted Assembly System) war die Unterstützung beim Zusammenstellen von Schweissteilen. Aufnahme und Positionierung werden vom Roboter übernommen, das Heften wird von der Schweissfachperson selbst ausgeführt. Mehr Informationen zu diesem Projekt