Indoor Navigation mit IMU
Navigation in Gebäuden
Globale Navigationssatellitensysteme (GNSS) sind eine weit verbreitete Methode für die Navigation. Es ermöglicht die Ermittlung der Position eines Empfängers an einem beliebigen Ort auf dem Planeten. Sobald der Empfänger allerdings den Sichtkontakt zu den Satelliten verliert, wie dies etwa in Gebäuden der Fall ist, versagen diese Systeme.
Technologien, um den Benutzer auch in Gebäuden an einen bestimmten Ort zu führen, sind unter anderem die Messung von Distanzen zu bekannten Positionen wie WiFi-Access-Points oder BLE-Beacons. Das ZSN hat eine Methode untersucht um die Position eines Benutzers ohne zusätzliche Gebäude-Infrastruktur zu verfolgen.
Dazu werden preiswerte MEMS-Sensoren wie Accelerometer, Gyroscope und barometrische Druck-Sensoren verwendet wie sie in jedem modernen Smartphone eingebaut sind. Das Ziel war einen Algorithmus zu entwickeln, welcher mit den Signalen dieser Sensoren eine Navigation mit einem in der Hand gehaltenen Gerät ermöglicht. Die Beschleunigungs-Signale des Accelerometer werden ausgewertet um eine zurückgelegte Distanz zu schätzen, während mithilfe des Gyroscopes bestimmt wird, in welche Richtung der Benutzer sich bewegt. Der Druck-Sensor wird benötigt um einen Wechsel des Stockwerks zu erkennen. Ist die Startposition bekannt, kann man nun mit Hilfe dieser Berechnungen und einem Grundriss-Plan innerhalb des Gebäudes navigieren.
Für die Entwicklung verwendete Hardware:
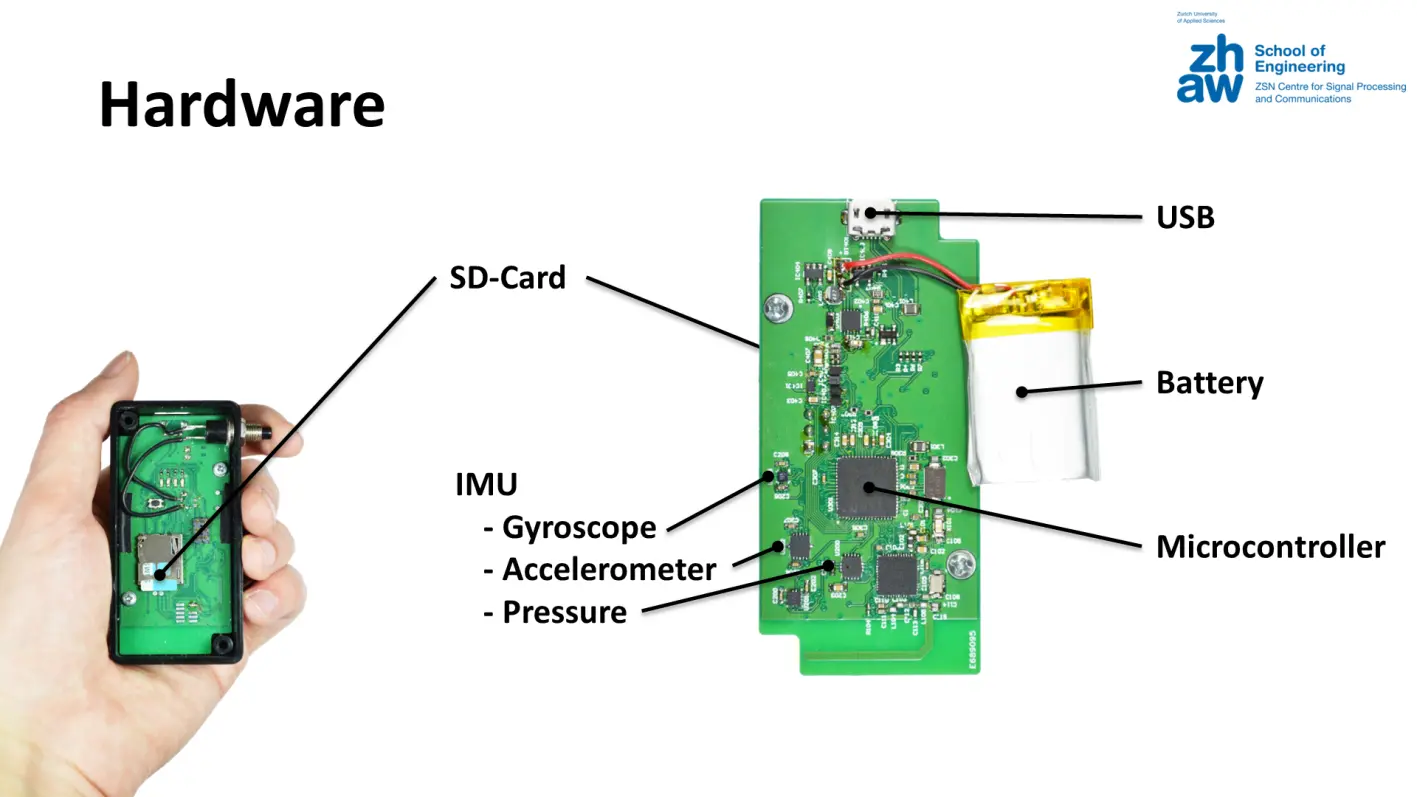
Kenndaten Referenzdesign:
- Microcontroller: EFM32LG
- Abbmessungen: 40x80x17mm (BxHxT)
Video

Auf einen Blick
Beteiligte Institute und Zentren:
Finanzierung: Direktaufträge
Projektstatus: beendet