Masterstudium am Institut für Mechatronische Systeme (IMS)
Welche Sensoren und Algorithmen verwendet man, damit eine Drohne autonom nach Hause fliegt? Wie entwickle ich den Antriebsstrang eines Elektromobils oder wie optimiere ich die Abfüllanlagen eines Getränkeherstellers? Antworten gibt es bei uns.
Mechatronics and Automation
Das Profil Mechatronics and Automation sind für alle Schwerpunkte des Instituts von Bedeutung. Von der Entwicklung von industriellen Produktionsprozessen und deren Vernetzung im Bereich Industrie 4.0 zur Integration von bildbasierter Sensortechnik zur Navigation von autonomen Robotern und Drohnen kommt das Fachwissen aus der industriellen Automation, Robotik, mechanische Konstruktion, Kommunikationstechnik, Embedded Systemen sowie von dynamischen Systemen und Regelung zum Tragen.
Electrical Engineering
Das Profil Electrical Engineering deckt ein sehr breites Themenspektrum in unseren Projekten ab. Die Leistungselektronik und Antriebstechnik, die Signalverarbeitung und Kommunikationssysteme sowie die Mess- und Regelungstechnik sind in unseren Forschungsprojekten stets von zentraler Bedeutung.
Energy and Environment
Gemäss verschiedenen Studien wird weltweit fast 50% der elektrischen Energie für den Betrieb von Motoren verbraucht. Im Profil Energy and Environment entwickeln und forschen wir an neuen Technologien und Konzepten um die Energieeffizienz von Antriebsystem zu verbessern. Dabei richtet sich unser Fokus auf die Entwicklung der Leistungselektronik und Motoren sowie die Regelung von spezifischen Anwendungen.
Medical Engineering
In Zukunft werden vermehrt Personen mit eingeschränkten Bewegungen oder Funktionen durch mechatronische Systeme unterstützt. Exoskelette sind insbesondere in der Rehabilitation kaum mehr wegzudenken. Im Profil Medical Engineering forschen wir an der Schnittstelle von Mensch und Roboter und bringen unsere Expertise aus den Bereichen Mechanik, Sensorik, Antriebstechnik und Embedded Systeme in angewandte Projekte ein.
Data Science
Das Profil Data Science spielt eine zentrale Rolle in zahlreichen Bereichen des Instituts. Von der Analyse grosser Datenmengen zur Optimierung industrieller Prozesse über die Entwicklung intelligenter Algorithmen für autonome Systeme bis hin zur Vorhersage von Wartungsbedarfen in der Fertigung – die Anwendungen sind vielfältig. Unser Fachwissen erstreckt sich über maschinelles Lernen, statistische Datenanalyse, Big Data Technologien, Datenvisualisierung sowie die Implementierung datengetriebener Entscheidungsprozesse. Durch die Kombination dieser Kompetenzen tragen wir zur Effizienzsteigerung und Innovationskraft in unterschiedlichsten Industriezweigen bei.
Module
Die zentralen Module (Kontextmodule CM, erweiterte theoretische Grundlagen FTP und technisch-wissenschaftliche Fachmodule TSM) finden sie im Modulbrowser. Das Institut für Mechatronische Systeme bietet zusätzlich folgende dezentralen Vertiefungsmodule an:
Informationsveranstaltungen und Anmeldung
Infoveranstaltungen
Anmeldung zum Studium
Anmeldungen für das Herbstsemester (mit Start im September) sind von Anfang Februar bis Ende April möglich, für das Frühlingssemester des nächsten Jahres (Start Februar) von Anfang August bis Ende Oktober.
Masterarbeiten
Hier einige Beispiele laufender oder kürzlich abgeschlossener Masterarbeiten am IMS.
Bahnplanungsalgorithmus und Trajektorienfolgeregelung für einen 2D mobile Roboter
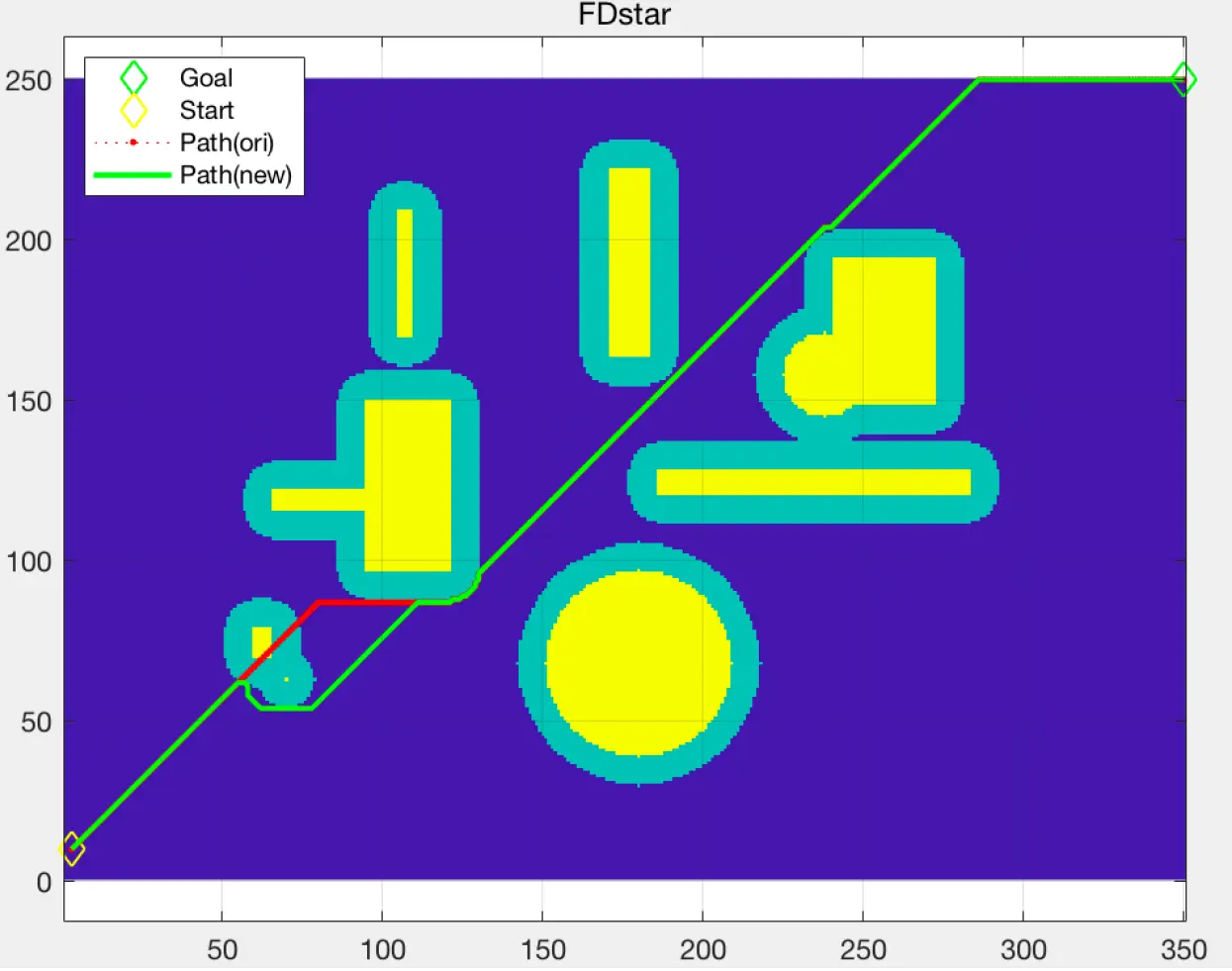
Mobile Roboter werden für ganz unterschiedliche Anwendungen eingesetzt, ein wichtiges Element dabei ist die autonome Erkennung der Umgebung und die autonome Navigation. Auf Basis einer Karte der Umgebung und der relativen Pose eines differentiell angetreibenen Roboters soll eine robuste Bahnplanung und Trajektorienfolgeregelung entwickelt werden, die den Roboter autonom an die gewünschte Stelle manövriert und möglichst eine niedrige Berechnungsintensität aufweist.
Geregelte Schussfadenbremse
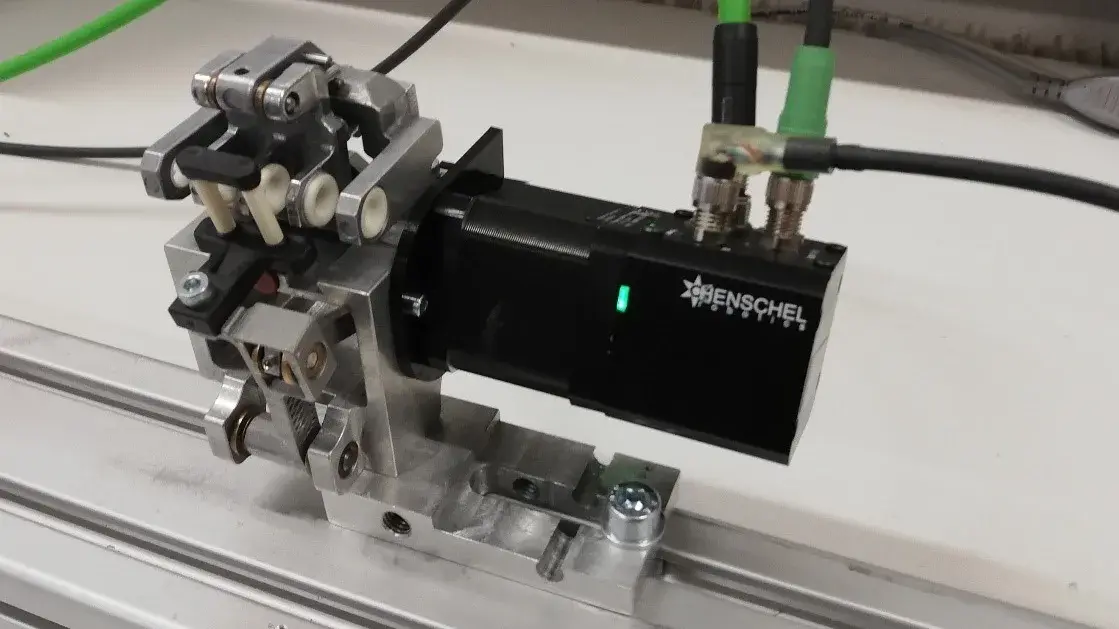
Bei Textilwebmaschinen ist die Spannung des Webfadens ein wesentlicher Einflussfaktor für gute Textilqualität. Die Fadenbremse hat die Aufgabe, für die gewünschte Fadenspannung zu sorgen. Handelsübliche Fadenbremsen müssen von Hand eingestellt werden; wenn die Fadenspannung aus diversen Gründen abdriftet und somit die Qualität des Textils negativ beeinflusst, muss dies rechtzeitig erkannt und durch eine Korrektur der Bremseinstellung behoben werden. Diese Masterarbeit hat das Ziel, eine autonome Bremse zu entwickeln, welche ein Abdriften der Fadenspannung rechtzeitig erkennt und die Spannungsabweichungen von selbst ausregelt.
Implementierung einer industrie 4.0 Verwaltungsschale für Roboter nach der RAMI4.0 Spezifikation
Im Bereich von Industrie 4.0 spielt die Asset Administration Shell (AAS) eine zentrale Rolle in der Implementation des Referenzarchitekturmodells RAMI4.0 (DIN SPEC 91354). In dieser Masterarbeit soll eine AAS für einen Industrieroboter vom Typ Panda von Franka Emika implementiert werden. Dieser Roboter ist ein wichtiger Bestandteil eines Industrie 4.0 Demonstrators, welcher zur Zeit am IMS gebaut wird. Auf Basis einer "open asset administration shell" von der RWTH Aachen soll eine erste Version einer AAS implementiert und gegenüber den Anforderungen des Demonstrators getestet werden, um danch in einem zweiten Schritt für andere Anwendungen im Bereich Industrie 4.0 generalisiert zu werden.
Weitere Informationen
Hochschulübergreifende Masterseite
Profil- und Modulbrowser für den MSE an allen Fachhochschulen.
Merkblatt Masterstudium
Merkblatt für Studierende des Master of Science in Engineering an der ZHAW School of Engineering.
Übersicht MSE
Hochschulübergreifende Masterseite
Merkblatt Masterstudium
Zur Übersicht Masterstudium. Studienmodell und Zulassung
Profil- und Modulbrowser für den MSE an allen Fachhochschulen.
Merkblatt für Studierende des Master of Science in Engineering an der ZHAW School of Engineering.