Bachelorarbeit Elektrotechnik: Tracking und Objekterkennung mit Radar-Sensor
Mehr sehen als mit den eigenen Augen
Damit sich Autos dereinst ohne menschliches Zutun im Strassenverkehr bewegen können, wird intensiv an Radaren zur Objekterkennung geforscht. Auch die Elektrotechnik-Absolventen Beat Käfer und Simon Vogel haben sich in ihrer Bachelorarbeit diesem Thema angenommen.
Er wird bereits heute in modernen Luxuskarossen eingesetzt: Die Rede ist vom frequency modulated continuous wave (FMCW) Radar. Bei diesem Radar wird die Frequenz der Funkwellen moduliert. Das Verfahren kann angewandt werden, um die Distanz zu einem Ziel und dessen Dopplerfrequenz zu messen; das heisst, das Radar kann andere bewegliche Objekte erkennen, lokalisieren und sogar deren Geschwindigkeit messen. FMCW-Radare eignen sich also ideal, um beim Autofahren als Assistenzsysteme zu dienen oder teilweise gar das autonome Fahren zu ermöglichen. Die Herausforderung: Die Radare müssen zuverlässig und schnell erkennen, was sich rund um das Fahrzeug abspielt, damit das System gegebenenfalls – in Echtzeit – darauf reagieren kann. Diesem Ziel sind die Elektrotechnik-Absolventen Beat Käfer und Simon Vogel in ihrer Bachelorarbeit ein kleines Stück näher gekommen.


Verarbeitungsprozess beschleunigen
In ihrer Bachelorarbeit haben die beiden Elektrotechnik-Absolventen digitale Signalverarbeitungsalgorithmen auf einem FMCW-Radar implementiert. Als Hardware diente ihnen dazu ein 24-GHz-Radarmodul der Firma RFbeam Microwave in St. Gallen, einem führenden Hersteller von Radar-Sensoren. Das Radarmodul besitzt eine Sende- und drei Empfangsantennen. «Wir haben die Hardware so programmiert, dass wir bis zu 60 Mal pro Sekunde eine Info bekommen, wo und wie schnell sich ein Objekt bewegt», sagt Simon Vogel. Um die dazu notwendige Rechenleistung zu erreichen, haben die beiden Absolventen die Signalverarbeitung in einem programmierbaren Logikbaustein implementiert. «Auf diese Weise können mehrere Berechnungen parallel gemacht werden, was den Prozess beschleunigt», so Beat Käfer.
«Wir haben die Hardware so bespielt, dass wir 60 Mal pro Sekunde eine Info bekommen, wo und wie schnell sich ein Objekt bewegt.»
Simon Vogel
Erfasste Daten auswerten
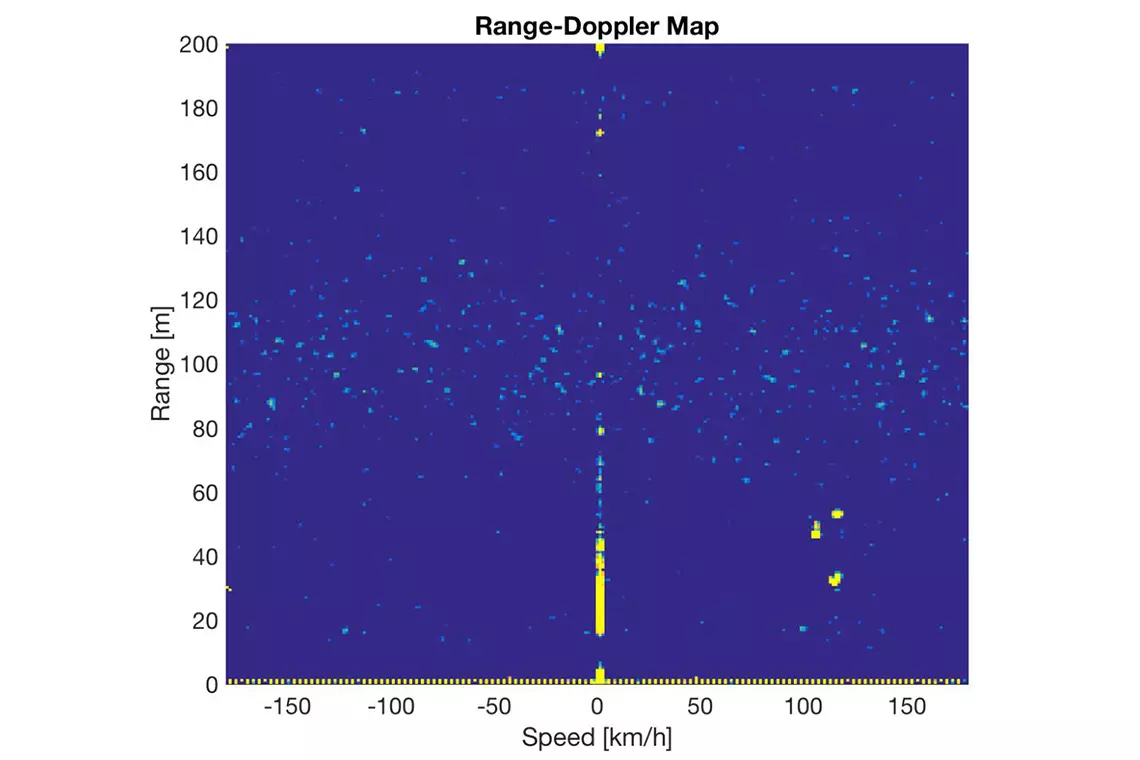
Das Implementieren der Signalverarbeitungsalgorithmen in der Radar-Hardware war der eine Teil der Arbeit. Weiter ging es für Beat Käfer und Simon Vogel darum, die Daten nach dem Erfassen schnellstmöglich auszuwerten. «Ein Ethernet Interface ermöglicht das Lesen der erfassten Daten am PC und erlaubt gleichzeitig auch das Konfigurieren des Radars», so Simon Vogel. Für die weitere Datenverarbeitung haben die Absolventen ein Programm mit der Software Matlab erstellt, das die Daten einerseits in Echtzeit darstellt und andererseits für die spätere Analyse aufzeichnet. «Auf unserer Karte ist eine sich bewegende Person auf bis zu 140 Meter Entfernung erkennbar; ein fahrendes Auto sogar bis zu einer Distanz von 340 Meter», sagt Beat Käfer. «Ausserdem konnten wir Geschwindigkeiten bis zu 180 km/h detektieren.»
Stoff für das Masterstudium

Ihre eigenen hochgesteckten Ziele haben die Absolventen aber dennoch nicht ganz erreicht, wie Beat Käfer sagt: «Obwohl das Ethernet Interface eine Bandbreite von einem Gigabit zur Verfügung stellt, war es nicht möglich, eine genügend schnelle Verbindung zu erstellen, um jedes erfasste Frame senden zu können.» Und Simon Vogel ergänzt: «Stand jetzt ist es so, dass wir quasi 60 Punkte pro Sekunde auf der Karte haben; wir lokalisieren also die Objekte, können aber noch nicht mit Bestimmtheit sagen, um was für Objekte es sich handelt.» Darin sehen die Absolventen Potenzial für die weitere Entwicklung, wie Beat Käfer ergänzt: «Die Grundlagen sind gelegt. Im Folgenden wird es darum gehen, beispielsweise einen LKW von einem Menschen unterscheiden zu können.» Auch diese Herausforderung nehmen die Absolventen an. Denn Beat Käfer und Simon Vogel werden das Projekt im Rahmen ihres Masterstudiums an der ZHAW School of Engineering weiterverfolgen.
Infotage und Anmeldeschluss Bachelorstudiengänge
Infoveranstaltungen
- Samstag, 09.11.2024 (Infotag Bachelorstudium)
- Dienstag, 26.11.2024 (Online-Infoabend Bachelorstudium)
Anmeldung zum Bachelorstudium
Das könnte Sie auch interessieren
Aufnahmebedingungen
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Studiumsvorbereitung
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.
Anmeldung zum Bachelorstudium
Aufnahmebedingungen
Studiumsvorbereitung
Melden Sie sich jetzt zum Bachelorstudium an.
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.