Biomedical Engineering
The research area
No matter if assisting or fully autonomous - today, mechatronic systems play an essential role in medical interventions, medical care and rehabilitation. They ensure precision, reliability and patient safety and thereby facilitate complex medical interventions on one hand and the development of optimized therapeutic and supporting measures on the other hand.
The focus of the IMS' biomedical engineering research area is on systems and instruments in the fields of minimally invasive surgery, rehabilitation, care and assistance. In close collaboration with national and international educational and industrial partners, the IMS develops innovative solutions for both patients and medical staff. Thereby, our staff's knowledge and experience often leads to the implementation of entirely novel approaches for tomorrow's medical technology.
Focus of the research area
- Instruments for minimally invasive surgery
- Medical microsystems
- Medical sensors and actuators
- Mechatronic implants
- Medical robotics
- Systems for rehabilitation, assistance and health protection
Teamleader and contact person Biomedical Engineering
Prof. Dr. Hans Wernher van de Venn
ZHAW
School of Engineering
Institute of Mechatronic Systems
Technikumstrasse 5
8400 Winterthur
Projects in Biomedical Engineering
NoCaTS: A New Catheter Tracking System

The aim of the NoCaTS (Novel Catheter Tracking System) project is to develop a system for tracking catheters without having to use contrast dye. More information
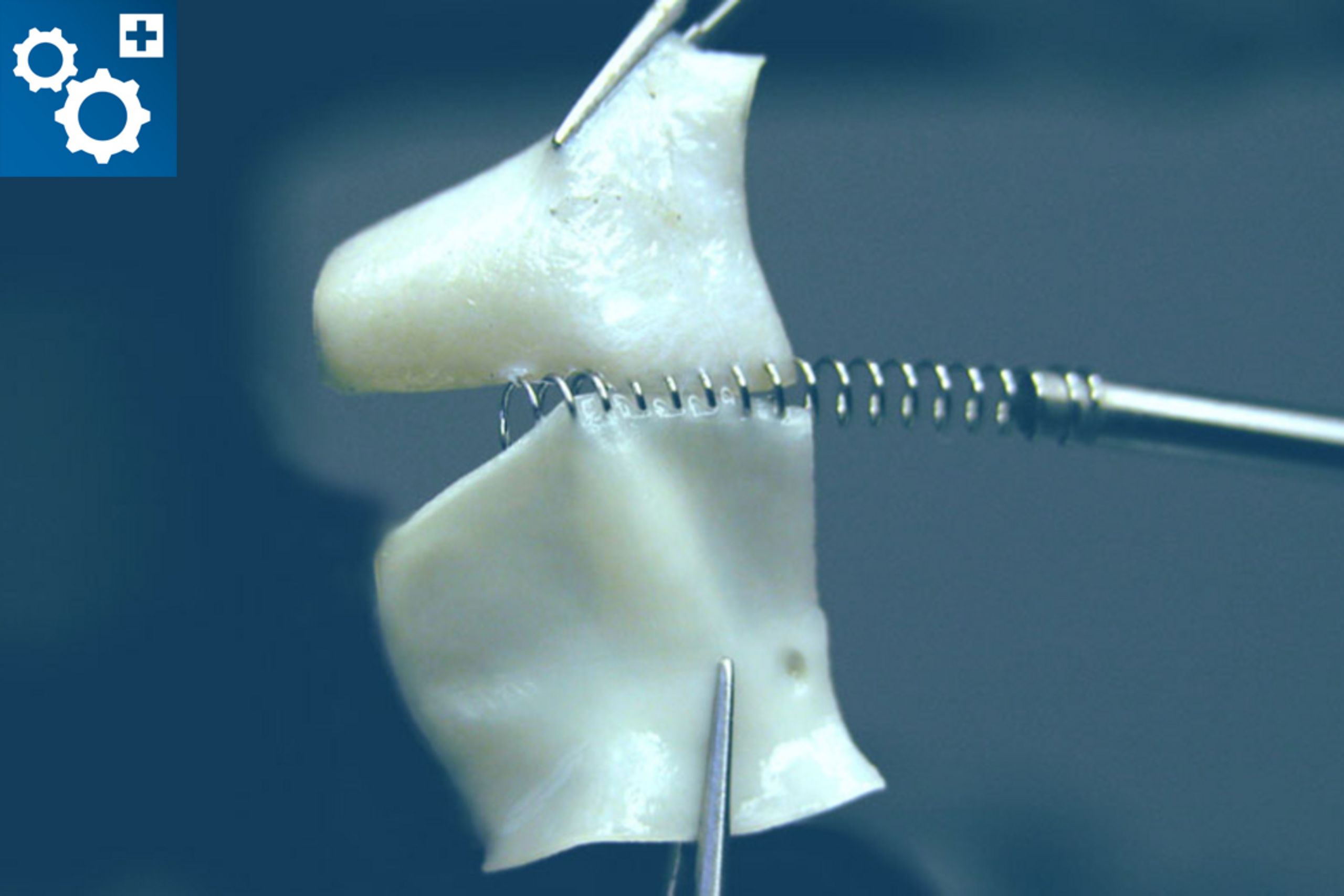
CASCADE: Control framework for continuum robots
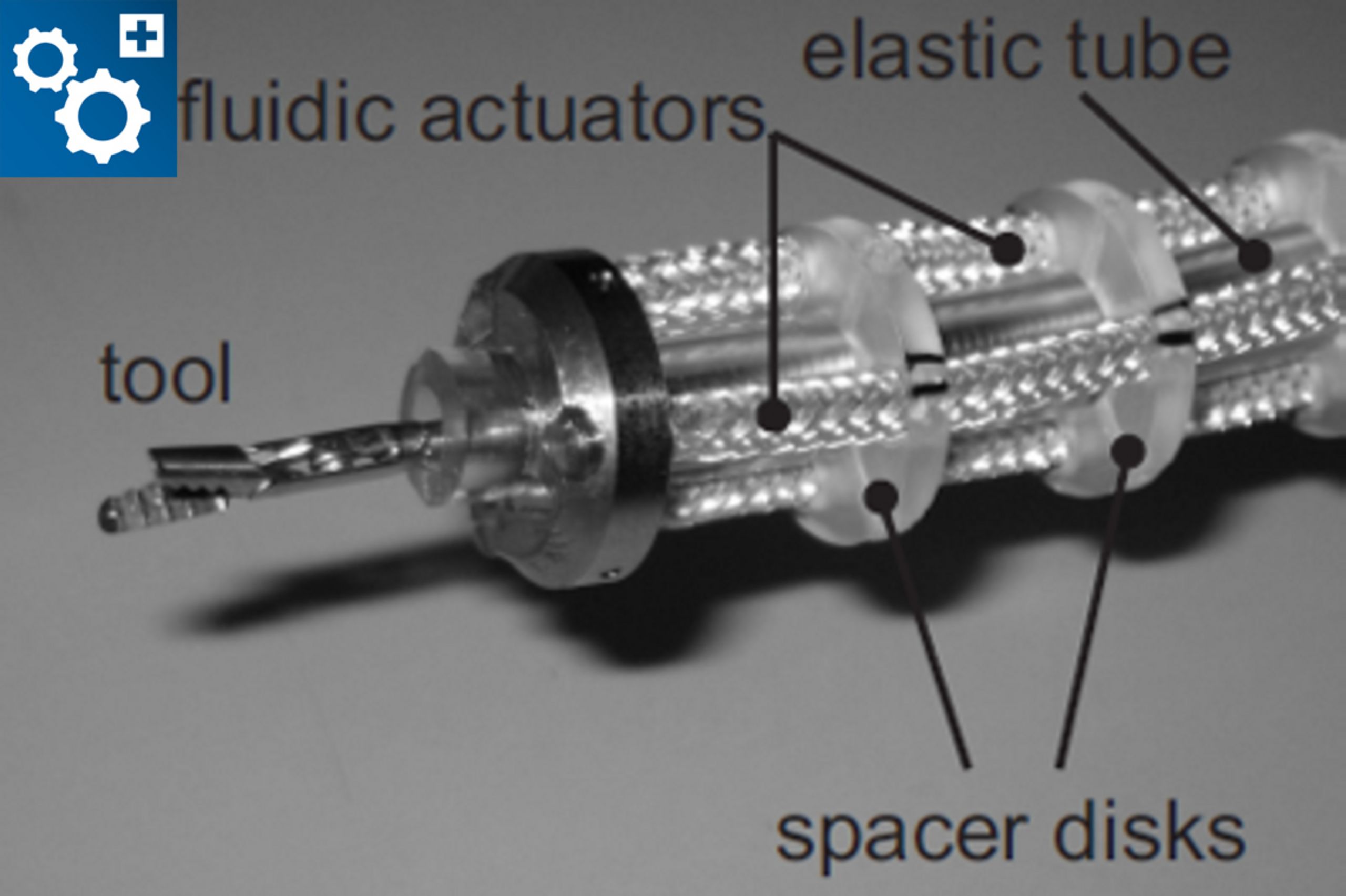
CASCADE is an EU-funded project in which a unified control framework for continuum robots that can operate in complex and deformable environments (specifically in the cardiovascular system) is developed. More information
SCATh: Improved catheter guidance

Smart Catheterisation (SCATh) developed a system for accurate catheter guidance. In order to improve patient safety, it provides visual and haptic tools for surgery assistance. In a novel approach, the platform fused preoperative patient-specific anatomical information and intra-operative data from different sensors. More information
Intersim: Endoscopy simulator with force feedback
The aim of the Intersim project was to develop hardware for low cost, realistic endoscopy simulators. More information
CO-ME: Surgical aid for heart bypass interventions
The aim of the CO-ME (COmputer aided and image guided MEdical interventions) project was to develop a surgical aid for heart bypass operations. More information
LASSO: Device for surgical operation simulation

The aim of the LASSO (Laparoscopic Surgery Simulator) project was to develop and assemble an input-device used for the simulation of surgical (laparoscopic) operations. More information