HORUS - High Operational Reliability for Unmanned Systems
Overview
The number of Unmanned Aerial Vehicles (UAVs) flying in the sky has increased significantly in the last years and will keep growing. UAVs are in general not designed taking into account the same safety standards of manned aviation. This is especially important for operations posing increased risk, such as flying beyond visual line of sight (BVLOS) or close to infrastructure. The European Aviation Safety Agency (EASA) came up with a proposal for a new regulation for Unmanned Aerial Systems (UAS) operations. Based on this context, the objective of this Federal Office of Civil Aviation (FOCA) funded project is the design of a system that enhances UAV safety.
Project Description
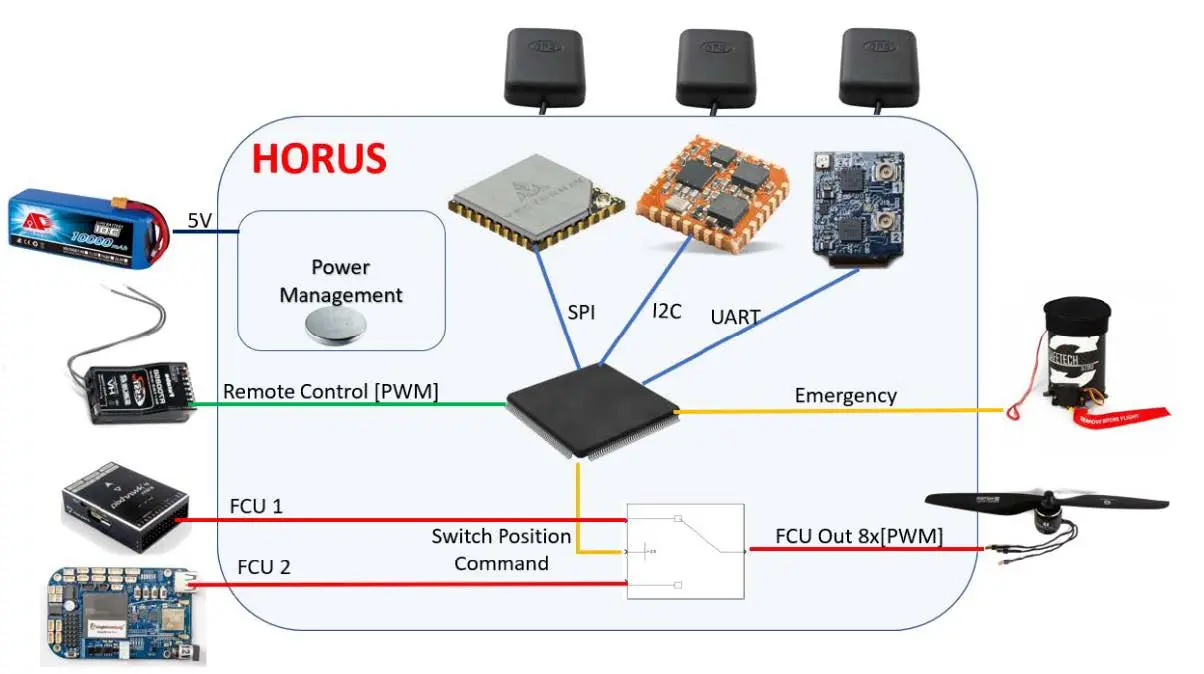
HORUS is a small hardware device that allows UAVs to be flown with two Flight Control Units (FCU) instead of a single one. The HORUS device offers the possibility to manually switch from one FCU to the other, but will also switch autonomously if the UAV gets out of the allowed geographic boundaries or out of its defined flight envelope. The device can also trigger a flight termination sequence if the secondary FCU fails to keep the vehicle within the intended limits.
Although envelope protection or geofencing features are commonly available on commercial off the shelf FCUs, they are generally not robust to sensor or FCU failures. But, as a result of its design, which has been developed following manned aviation safety process guidelines, the HORUS device offers high reliability and integrity. To do so, a requirements-based design has been followed, while satisfying industry standards (RTCA/DO-178C, RTCA/DO-254, RTCA/DO-160, SAE-ARP 4754A and SAE-ARP 4761) as far as it was feasible in the scope of the project.
Flight tests were performed to demonstrate the capabilities of HORUS, and the device was presented at the 2022 European Rotorcraft Forum (ERF) in Winterthur.
At a glance
- Involved Institutes and Centres: Centre for Aviation (ZAV), Institute of Embedded Systems (InES)
- Project Lead: Benoit Figuet
- Project Team: Benoit Figuet, Prosper Leibundgut, Andrea Pedrioli, Raphael Monstein, Arno Frauenfelder, Hans Doran, Pierluigi Capone
- Project Financing: BAZL special financing for air traffic
- Project duration: 2018 - 2022