Development of a unicondylar knee joint prosthesis with physiological kinematics
At a glance
- Project leader : Dr. Michaela Nusser
- Project team : , Adrian Gomez Diaz , Luca Kiener, Markus Rohner
- Project status : completed
- Funding partner : Innosuisse (Innovationsprojekt / Projekt Nr. 36710.1 IP-LS)
- Project partner : Mathys AG Bettlach
- Contact person : Michaela Nusser
Description
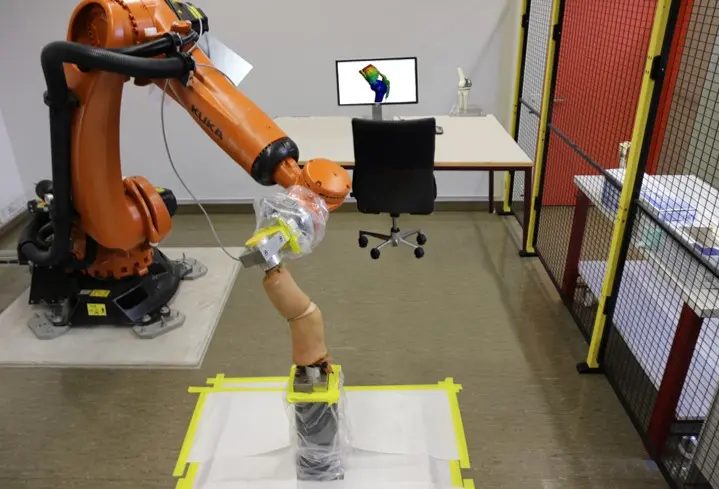
This project has two objectives: 1. to optimise the surface geometry of an existing unicondylar knee prosthesis in order to enable natural knee kinematic 2. to model and validate a generally valid parameter model of the knee ligaments in FEA.
In the development process, both experimental robot-supported tests on human specimens and calibrated FE models are used.
Publications
-
Kiener, Luca; Gomez, Adrian; Tschupp, Gabriel; Nusser, Michaela,
2023.
Development of scalable finite element models based on knee laxity tests on cadavers [poster].
In:
28th Congress of the European Society of Biomechanics (ESB), Maastricht, The Netherlands, 9 -12 July 2023.
ZHAW Zürcher Hochschule für Angewandte Wissenschaften.
Available from: https://doi.org/10.21256/zhaw-28440
-
Kiener, Luca; Nusser, Michaela,
2023.
Generalised ligament model for finite element modelling of the knee [poster].
In:
XXIX Congress of International Society of Biomechanics (ISB), Fukuoka, Japan, 30 July - 3 August 2023.
ZHAW Zürcher Hochschule für Angewandte Wissenschaften.
Available from: https://doi.org/10.21256/zhaw-28424
-
Nusser, Michaela; Kiener, Luca; Tschupp, Gabriel,
2023.
Use of an industrial robot to record human knee kinematics in vitro - evaluation of the test method.
In:
28th Congress of the European Society of Biomechanics (ESB), Maastricht, The Netherlands, 9 -12 July 2023.