Micro Delta: Fast and highly precise robot system
The Micro Delta project aimed at developing a fast and highly precise robot system. The robot was designed to significantly outperform the precision and speed of current systems and to be cost-effective at the same time.
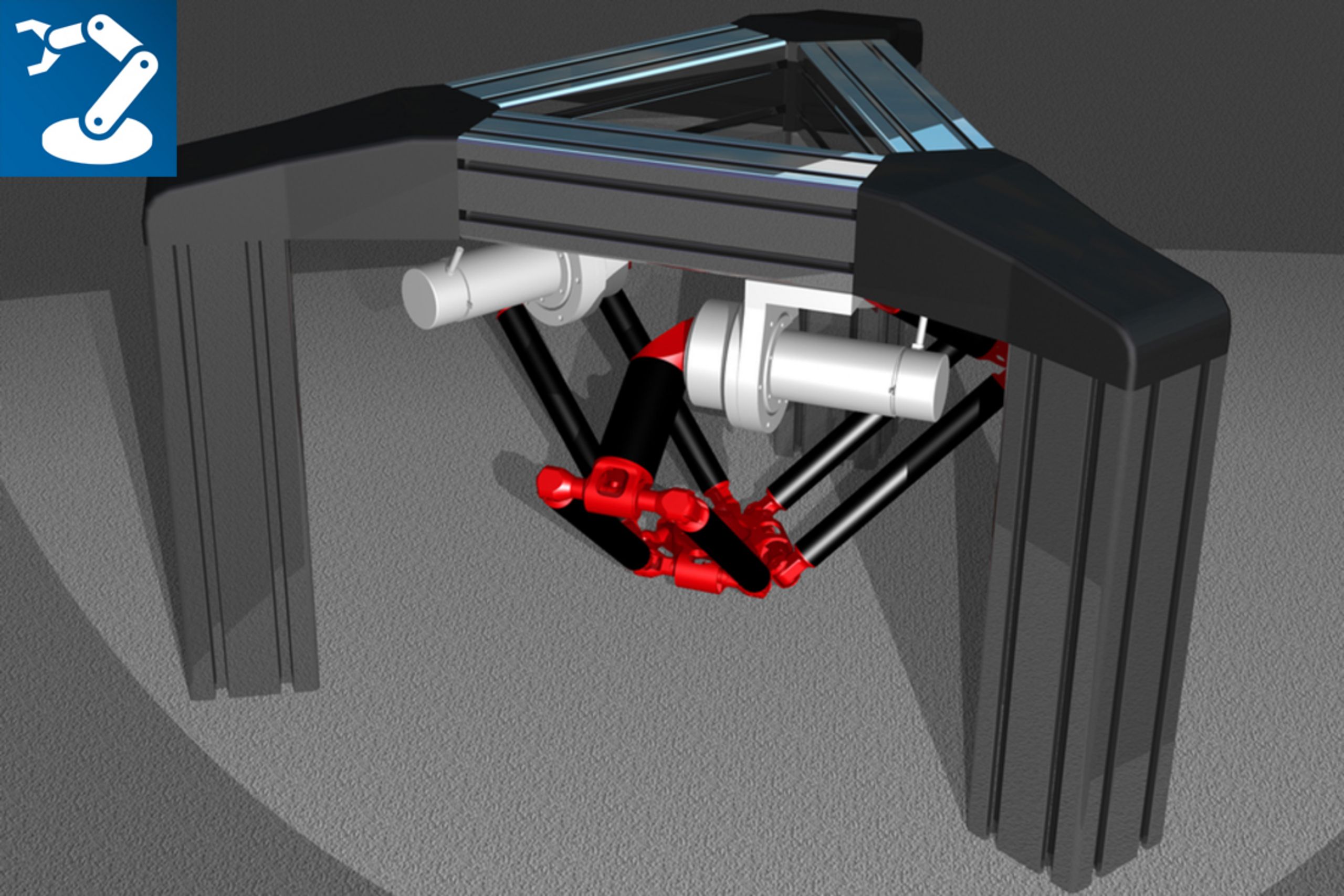
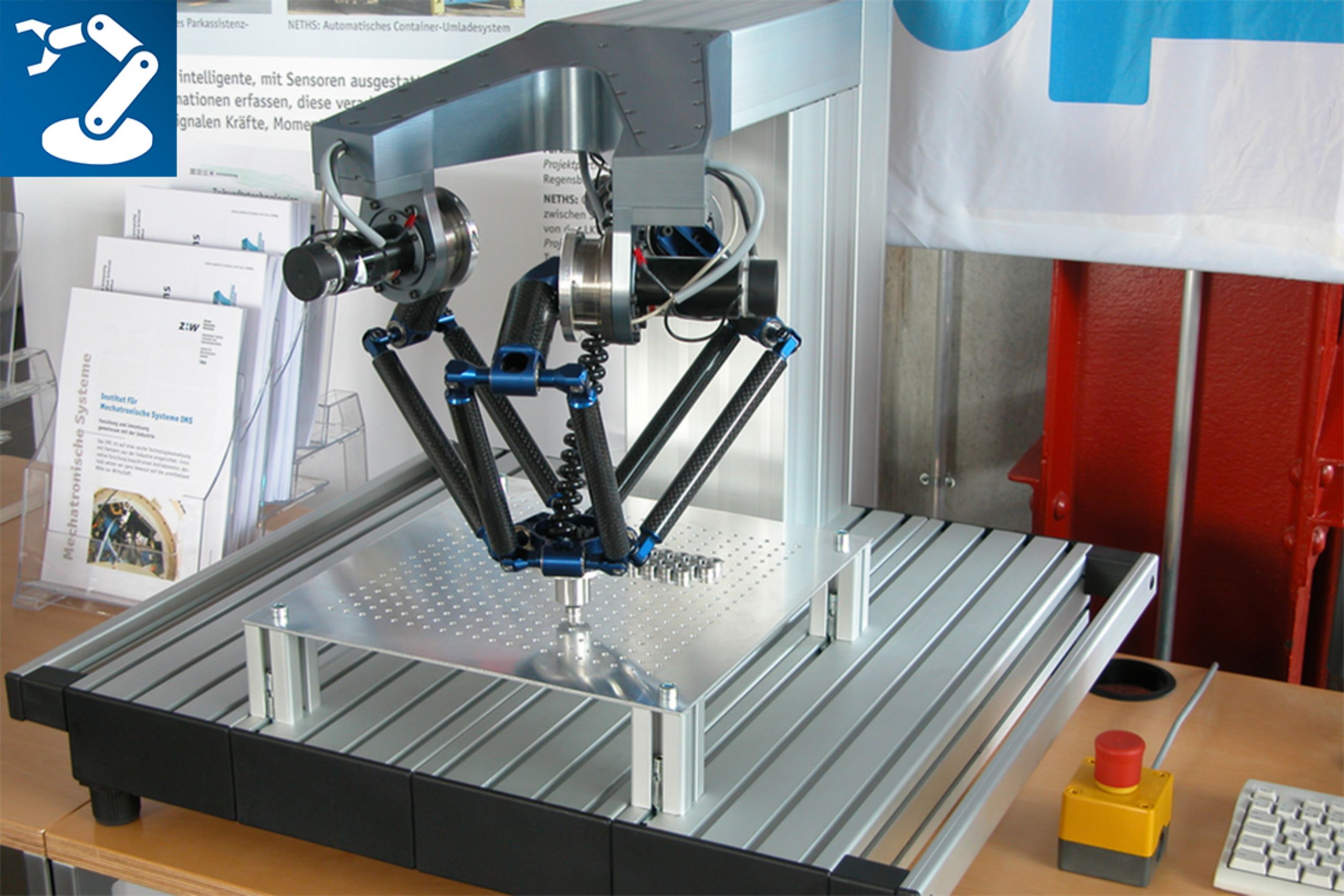
Two nearly identical kinematics were implemented: one with servo motors and harmonic drive gear and one with gearless drive kinematics.
In a further step, a highly integrated force/momentum measurement system enabling the implementation of force controlled tasks was engineered. Its controller is JAVA based and thus allows implementing highly complex algorithms.
Technical requirements
Operating range
- x-direction minimum 0.1 m (ca. 0.15 m)
- y-direction minimum 0.1 m (ca. 0.15 m)
- z-direction minimum 0.05 m (ca. 0.08 m)
- phi-z-angle +/- 2p
Size
- 0.5 m x 0.5 m x 0.5 m (0.3 m x 0.3 m x 0.3 m)
Speed and acceleration
- Pulse min. 5 cycles per second
- Each position must be reachable from the center of the operating area within 0.1s
- Goal: 0.1m in 0.1s
Actual load
- Min. 0.25 kg incl. gripper (requested 0.5 kg), for fast movements 0.1 kg.
Precision
- Highest precision requested only for slow movements
- Resolution 0.0001 mm, 1 mrad
- Position adjustment 0.001 mm, 100 mrad
- Repeat accuracy 0.002 mm, 200 mrad
- Absolute accuracy 0.1 mm, 10 mrad
Control
- 4 servo axes
- Possibility of complex control
- Sampling rate down to 0.1 ms
- Java based
Micro Delta in action:

Contact IMS:
-

ZHAW School of Engineering
Technikumstrasse 9
8400 Winterthur