LIDAR Flight Guidance – Obstacle Visualization on the Mobile Remote Pilot Station
Voxel Representation in Flight Testing: High-resolution LIDAR data is used to visualize obstacles, thereby enhancing the pilot's situational awareness.
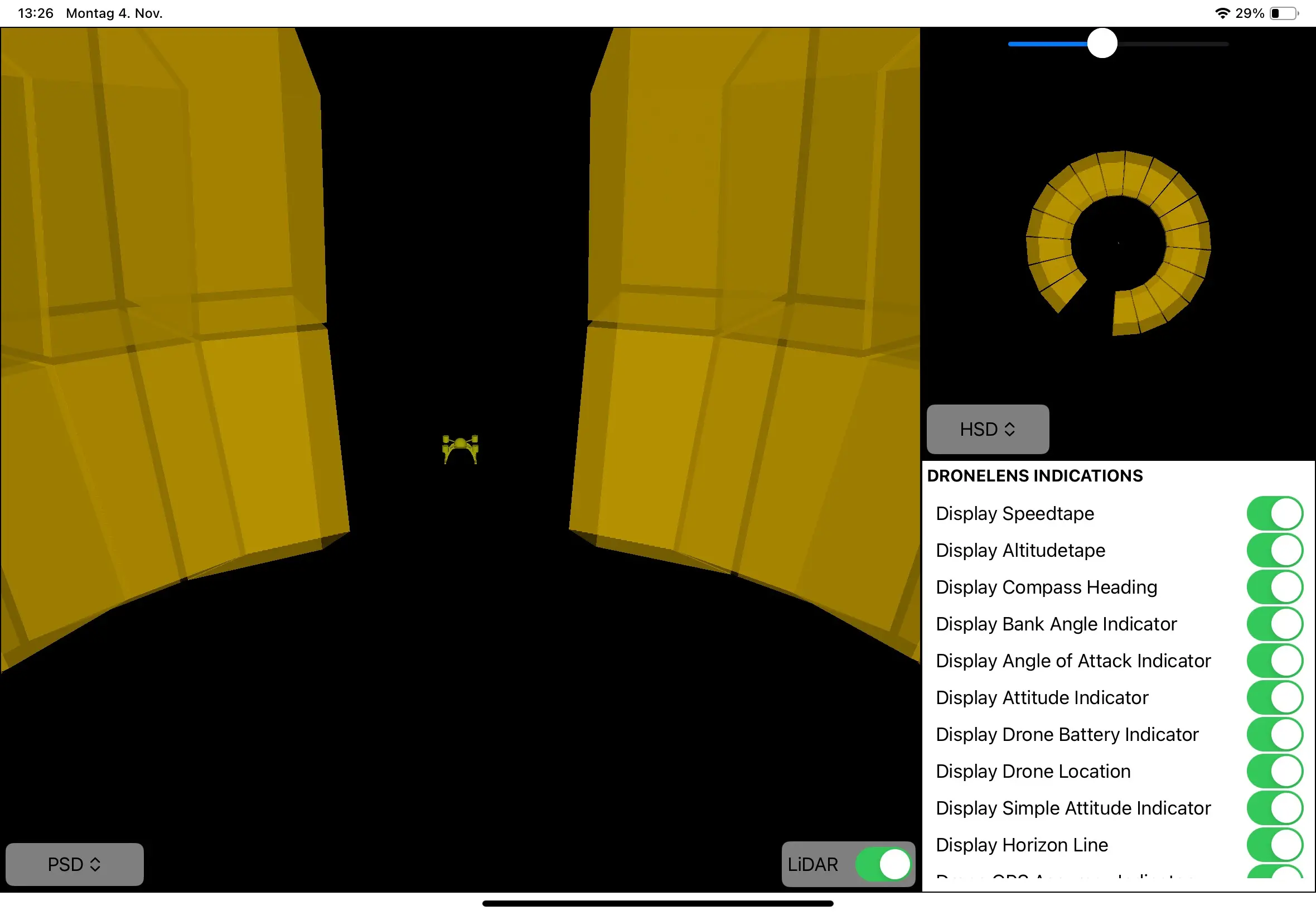
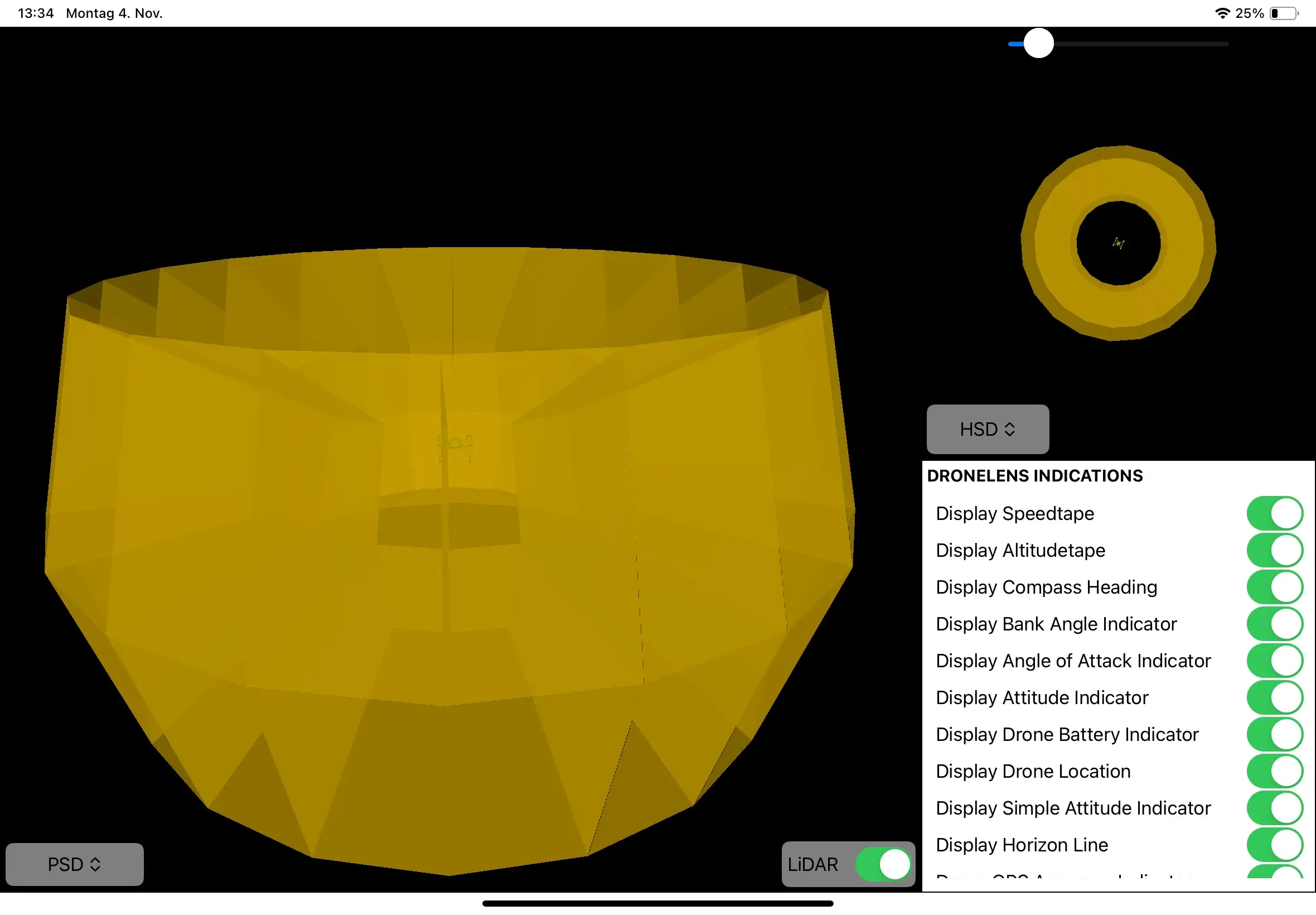
The voxel representation concept utilizes point cloud data from LIDAR sensors to display airspace obstacles for the pilot on the mRPS. Voxels are cuboid 3D elements that visualize obstacles; the pilot can choose from various display options. When an obstacle is detected, the voxel is shown in the corresponding sector.
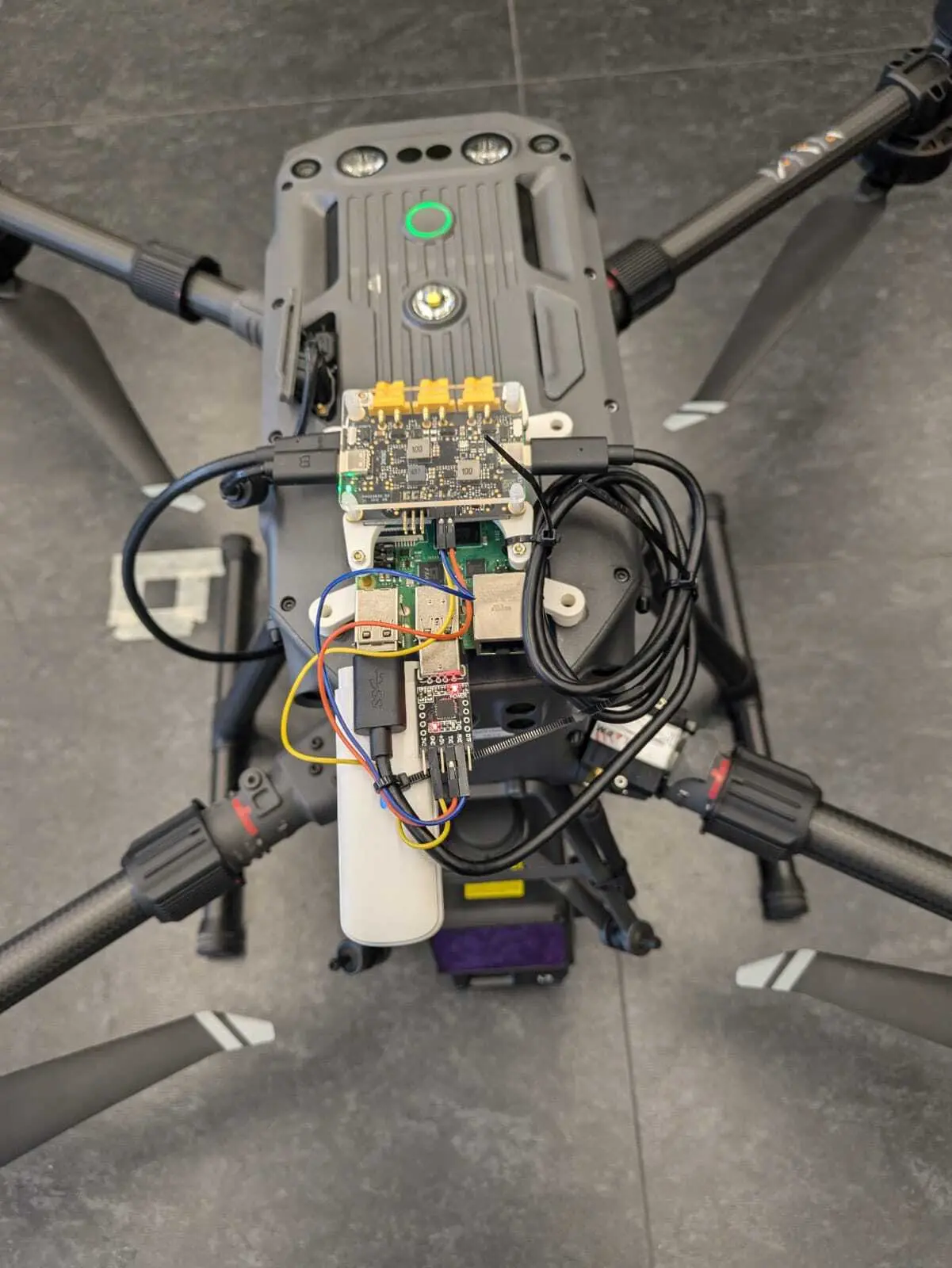
The voxel representation has been in development for some time and has repeatedly encountered delays due to technical issues. These delays were primarily caused by the previously used LIDAR sensors significantly affecting the flight characteristics of the drone used, a Matrice M300, due to their weight. Consequently, the older LIDAR system has been replaced with the lighter Zenmuse L2 LIDAR from DJI. The LIDAR data is read directly on the drone by a Raspberry Pi and transferred to the mRPS via a server. While data processing occurs on the drone, the mRPS handles the display.
The current representation is being evaluated as part of a student project thesis, and the results are expected to contribute to a future improved version.