Wireless Body Area Network for Autonomous Robots (roboBAN)
Autonome Gehmaschinen benötigen Sensoren an jedem Fuss zur Messung der Auftrittskraft in drei Dimensionen. Kabel für die Sensoren schränken die Beweglichkeit der Beine ein.
Das entwickelte Konzept für ein Wireless Body Area Network erreicht eine ausreichend hohe Übertragungssicherheit und –häufigkeit bei Minimierung des Energieverbrauchs. Es ist für den Einsatz von Energy Harvesting ausgelegt.
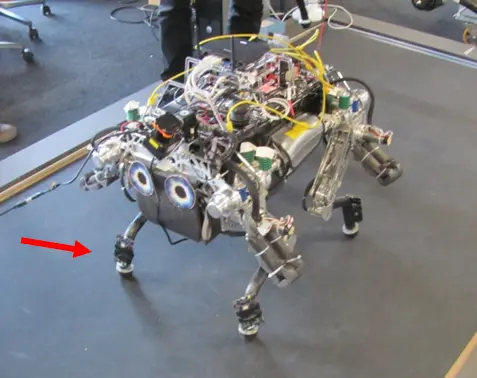
In Versuchen mit dem ETH-Roboter «StarlETH» konnte die Machbarkeit anhand einer konkreten Anwendung nachgewiesen werden. Der Prototyp besteht aus vier kabellosen Sensorknoten, die jeweils die Kraft in drei Dimensionen messen. Jeder Sensorknoten sendet pro Millisekunde ein 19 Bytes grosses Funkpaket im Advertisingverfahren an die Zentraleinheit auf drei Funkkanälen. Das System benötigt dazu eine Gesamtenergie von 8.6 uJ bei 0 dBm Sendeleistung. Das Konzept kann ohne Modifikation auf bis zu 256 Knoten erweitert werden.
Die Ergebnisse lassen sich direkt auf Sensoren und Sensornetzwerke am menschlichen Körper übertragen, zum Beispiel für Fitness- oder Medizinalanwendungen.
