Demonstrator für IMU-Datenfusion
Ausgangslage
Mit einem IMU-Sensor bzw. einer Inertial Measurement Unit können Beschleunigungs- und Drehratenmesswerte erfasst und daraus die Orientierung eines Objekts geschätzt werden. Ein IMU-Sensor besteht aus einem 3-Achsen Beschleunigungssensor und einem 3-Achsen Drehratensensor (Gyroskop). Manchmal wird zusätzlich noch ein 3-Achsen Magnetometer im Sensor integriert.
MEMS-basierte IMU-Sensoren sind heute relativ preiswert, weil sie in grossen Stückzahlen in Smartphones, Drohnen usw. verbaut werden. Sie werden deshalb zunehmend auch in Produkten mit kleineren Stückzahlen integriert.
In den letzten Jahren hat das Institute of Signal Processing and Wireless Communications (ISC) zahlreiche Forschungsprojekte realisiert, in denen IMU-Sensoren eine zentrale Rolle spielten. In diesem Zusammenhang ist auch der folgende «IMU-Demonstrator» und das zugehörige Video entstanden.
Demonstrator
In der folgenden Abbildung ist der Demonstrator und das Blockdiagramm dargestellt.
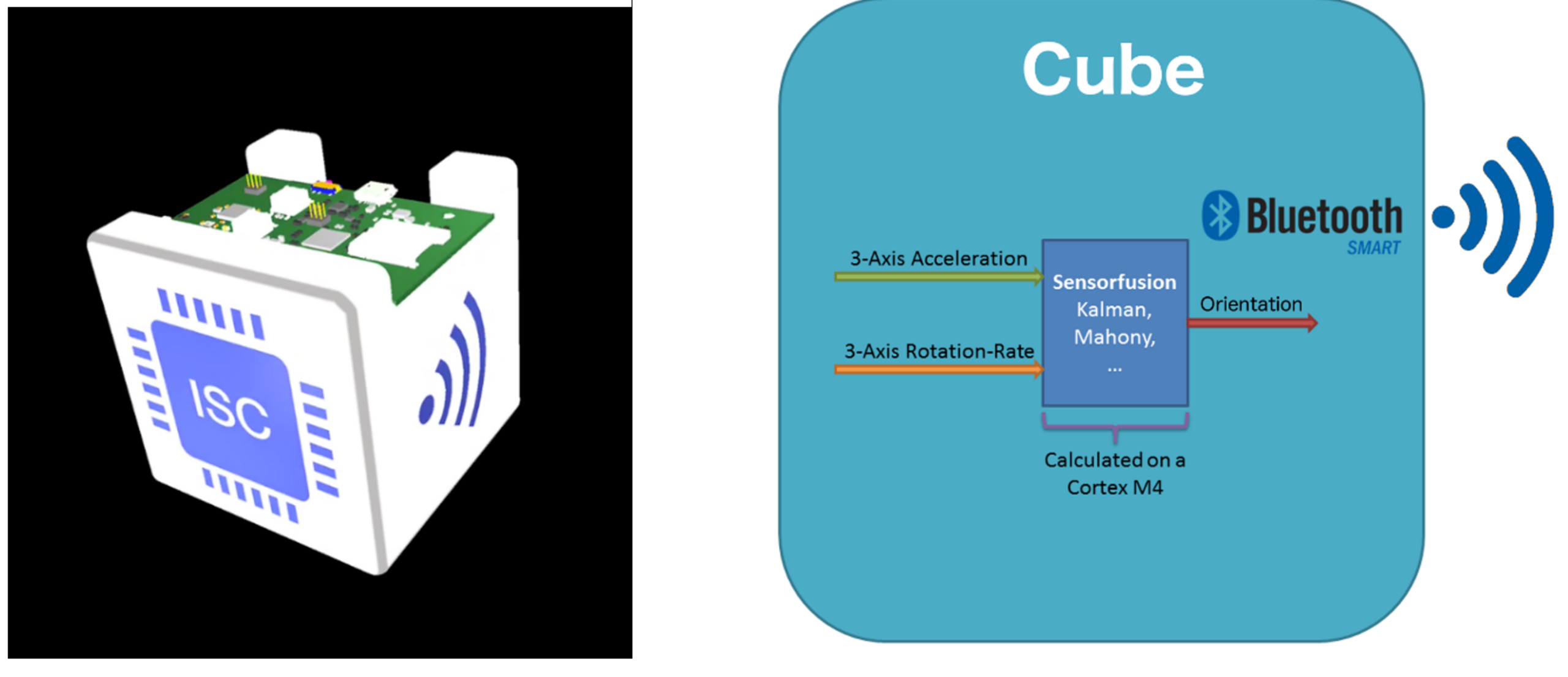
Der Demo-Würfel enthält einen IMU-Sensor, einen ARM Cortex M4 Microcontroller, eine Bluetooth Low Energy Schnittstelle und einen Akku. Der IMU-Sensor erfasst 100 Mal pro Sekunde die Beschleunigungswerte in Richtung der lokalen x-, y- und z-Achse sowie die 3 Winkelgeschwindigkeiten bzw. Drehraten um die Achsen. Im Microcontroller wird die Orientierung des Demo-Würfels mit einem Datenfusionsalgorithmus geschätzt und die resultierenden Daten (Quaternionen) auf ein Tablet übertragen, um sie in Echtzeit darzustellen.
Video
In folgendem Video wird die Orientierungsbestimmung
- mit Hilfe einer Datenfusion der Accelerometer- und Gyroskop-Messwerte,
- nur mit den Accelerometer-Daten,
- nur mit den Gyroskop-Daten und
- nur mit den Magnetometer-Daten
demonstriert und die entsprechenden Stärken und Schwächen aufgezeigt.
