Advanced Rail Track Information System (ARTIS)
Beschreibung
Das Ziel Projektes war es, die Vermessung von Bahngleisen und Referenzmarken mittels einer Kombination von 3D Daten von Laserscannern und 2D Kamerabildern durchzuführen. Es wurde mit den folgenden Arbeitspaketen realisiert:
Targeterkennung
In diesem Arbeitspaket wurden Algorithmen entwickelt, die aus 3D Punktewolken von Tunnels Zielmarker automatisch erkennen können, um so die georeferenzierte Positionsbestimmung des Messsystems zu automatisieren. Dazu wurde eine Methode entworfen, welche auch bei einer tiefen Bildauflösung in Fahrtrichtung robuste Resultate liefert.
Design Elemente schätzen
Für die Kartografierung unkartografierter Schienenstrecken ist das Bestimmen der Gleiselemente (Design Elemente) ein wesentlicher Schritt. Es wurde ein Algorithmus entwickelt, welcher Gleiselemente bestehend aus Klothoiden, Kreisbögen und Geraden in einer vorgegebenen Trajektorie identifizieren und optimieren kann.
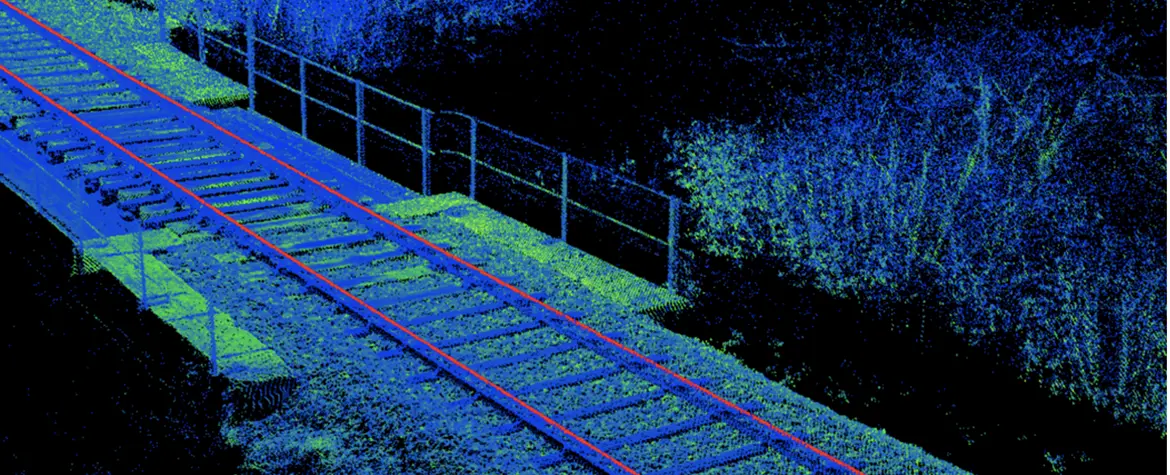
Schienenkopf- und Gleisparameterextraktion
Mit einem auf den Schienen fahrenden Messsystem werden Punktewolken eines Gleisabschnittes aufgenommen. Aus diesen Punktewolken werden mit Software-Algorithmen die Schienenköpfe automatisch identifiziert, um damit Gleisparameter wie die Trajektorie, Spurweite und Überhöhung zu bestimmen, welche dann z.B. für die Kartografie weiterverwendet werden können.
Analysen haben ergeben, dass die Algorithmen-Parameter auf den Sensortyp, die Gleistrajektorie (hohe Steigung und enge Kurvenradien bei Bergbanen) und die Umgebungsbeschaffenheit (Bewachsene Gleisabschnitte) abgestimmt werden muss, um zuverlässige Messdaten zu erhalten.
Sensorfusion mit Kamera und Laserscanner
Da präzise Laserscanner sehr kostspielig sind, wurde ein Konzept untersucht, welches die präzisen Messdaten von Kamerabildern und Scans eines günstigen Laserscanners fusioniert. Das Ziel war eine präzise Lokalisierung eines Markers im dreidimensionalen Raum relativ zum Messsystem. Mit einer in diesem Arbeitspaket entwickelten Methode wurden erfolgreich dreidimensionale Markerpunkte gemessen, welche eine horizontale und vertikale Genauigkeit der Kamera und eine Distanzgenauigkeit des Laserscanners aufweisen.
Eckdaten
Projektleitung
Prof. Dr. Marcel Honegger, Dejan Seatovic
Projektteam
Rebekka Axthelm, Evangelos Matsinos, Leandro Chelini, Benjamin Engler, Fabian Hertner, Alain Buri
Projektpartner
Amberg Technologies AG
Projektstatus
abgeschlossen, 06/2015 - 05/2017
Institut/Zentrum
Institut für Mechatronische Systeme (IMS); Institute of Computational Physics (ICP)
Drittmittelgeber
KTI
Projektvolumen
423'000 CHF

School of Engineering
Technikumstrasse 9
8400 Winterthur