ZHAW CAI at ICRA 2026: a paper on 4D Scene Graphs
Dr. Jorge Peña Queralta was at ICRA 2026 in Vienna, one of the world’s leading robotics conferences, to present “AION,” new research on helping autonomous robots understand how their surroundings change over time through 4D Scene Graphs. He was also promoting the upcoming Davos Tech Summit, which ZHAW co-organizes.
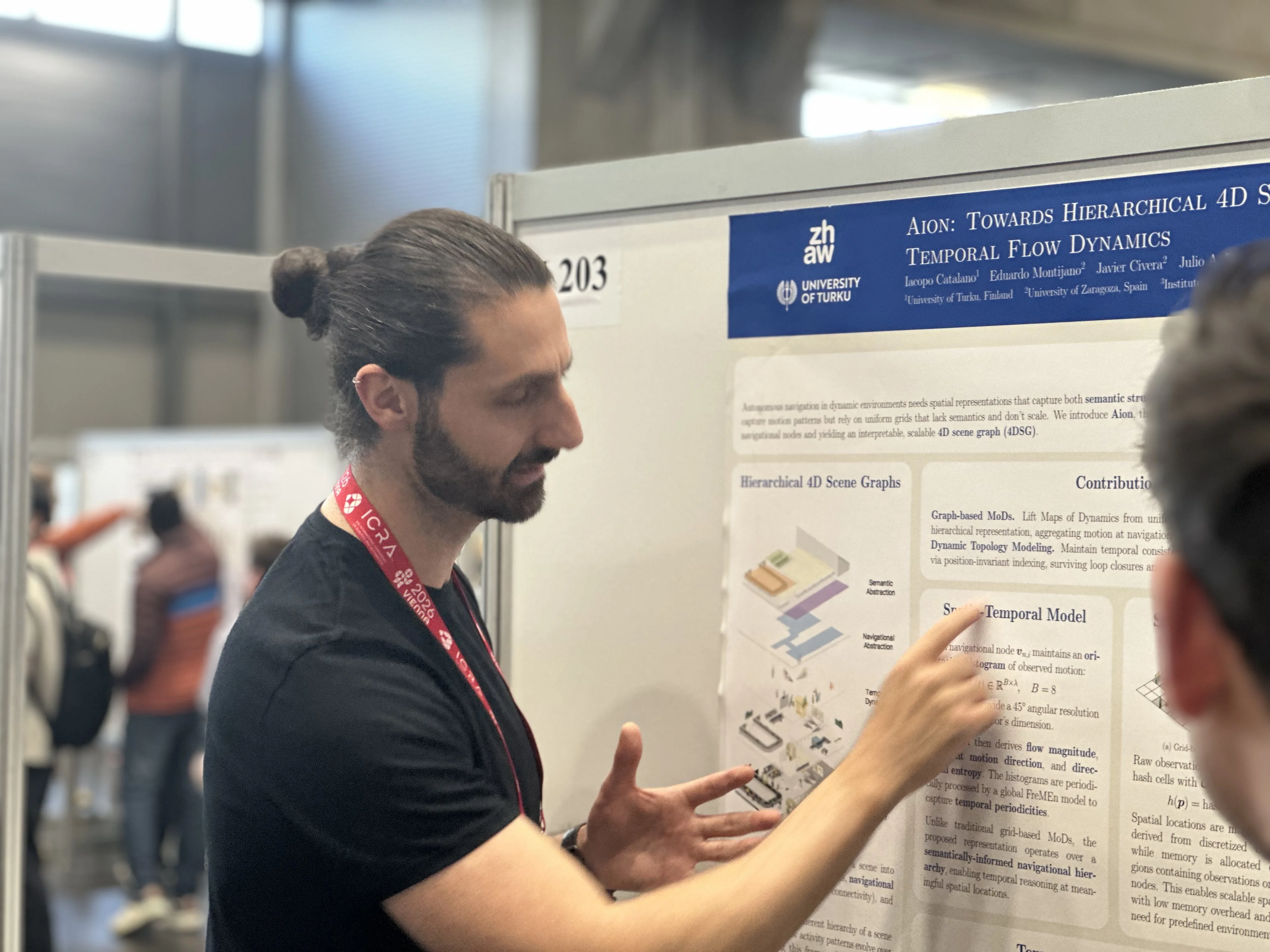

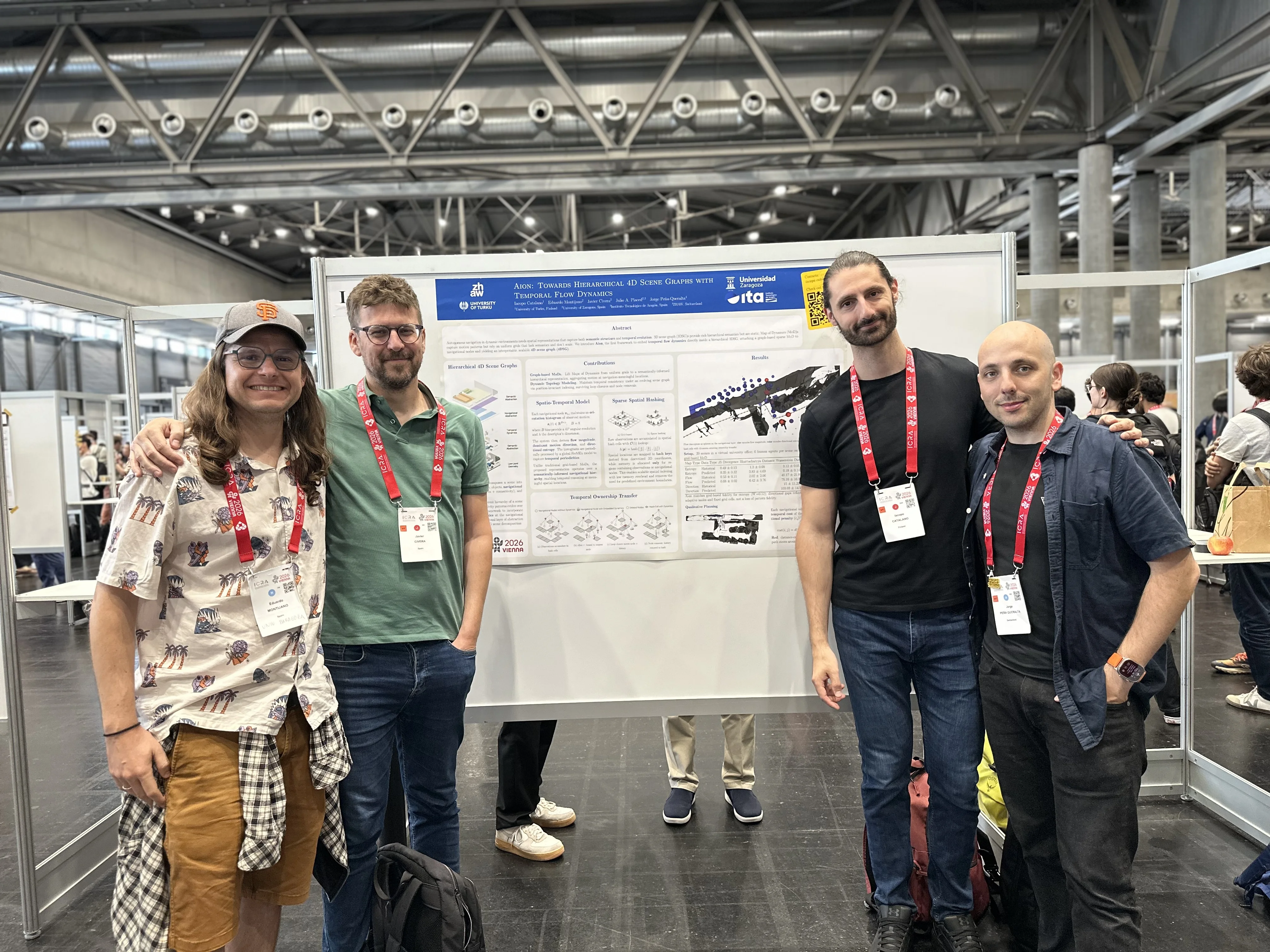
Dr. Jorge Peña Queralta, Head of the Embodied Mobile Agents research group at the ZHAW Centre for Artificial Intelligence (CAI), attended the IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria, from 1 to 5 June. It is one of the largest and most influential academic gatherings in robotics and AI.
At the conference, the CAI presented AION, a new research paper developed with international partners (the University of Turku in Finland and the University of Zaragoza in Spain). The work addresses a practical challenge for robots that move through busy, changing spaces: most maps capture only what an environment looks like at a single moment. AION adds the dimension of time, so a system can learn the typical motion patterns of a place, where people and objects tend to move, when, and in which direction.
This richer, time-aware picture of the world lets an autonomous robot anticipate what is likely to happen next rather than simply react to it, leading to safer and more efficient navigation in crowded, dynamic environments.
The paper’s full title is “AION: Towards Hierarchical 4D Scene Graphs with Temporal Flow Dynamics,” and the code is openly available.
Alongside the scientific programme, Dr. Peña Queralta used ICRA to promote the upcoming Davos Tech Summit, which the CAI is proud to co-organize, and to connect with the global robotics and AI community.