Monitoring of Building Constructions with Passive RFID Technology
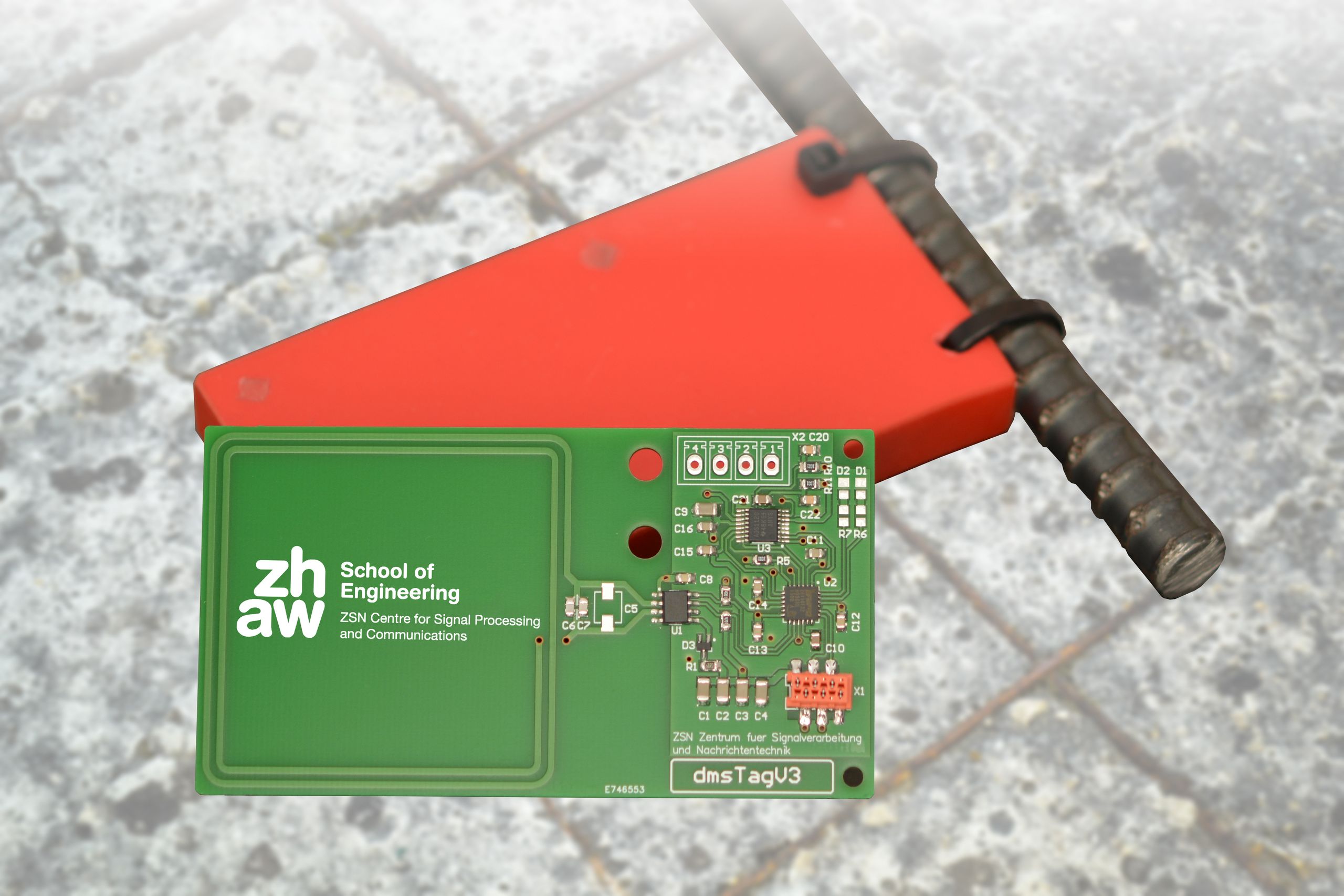
A passive RFID based sensor system with energy harvesting that measures mechanical stress in reinforcing steel was developed at the Institute of Signal Processing and Wireless Communications (ISC, formerly ZSN) at the Zurich University of Applied Sciences (ZHAW), Switzerland.
The monitoring of building constructions which are made of reinforced concrete for the most parts of the world will be of increasing significance in the future to determine the current condition, structural safety and fatigue behaviour of the constructions. As just mentioned a monitoring process can be used to plan the maintenance intervals by giving the possibility for an early detection of fatigue damages. The physical variable that is being measured as basis for the evaluation is the mechanical stress in reinforcing steel.
In order to measure this mechanical stress with current available systems, the steel has to be located and set free. In case of a new construction, it is also possible to place the strain gauge on the reinforcing steel during the building phase and to have a wired solution for an external connection of a data logger. This wiring with its connectors is prone to get damaged and worn by aging.
The new monitoring concept is based on a measuring system where the sensor is completely embedded in the concrete and uses a wireless link between the sensor and the monitoring terminal. The major advantage of a wireless sensor is the easy handling during the installation, because no cables and connectors have to be wired externally. To ensure the livelong monitoring of a structure or exceed the expectation of more than 30 years, the sensor embedded in concrete has to be passive and therefore without a battery. This implies that the wireless link also has to deliver the power to the sensor. Such a sensor, the dmsTag, was successfully developed at the ZHAW ISC. The project was initiated by enertec engineering AG, Switzerland.
Selection of RFID Frequency
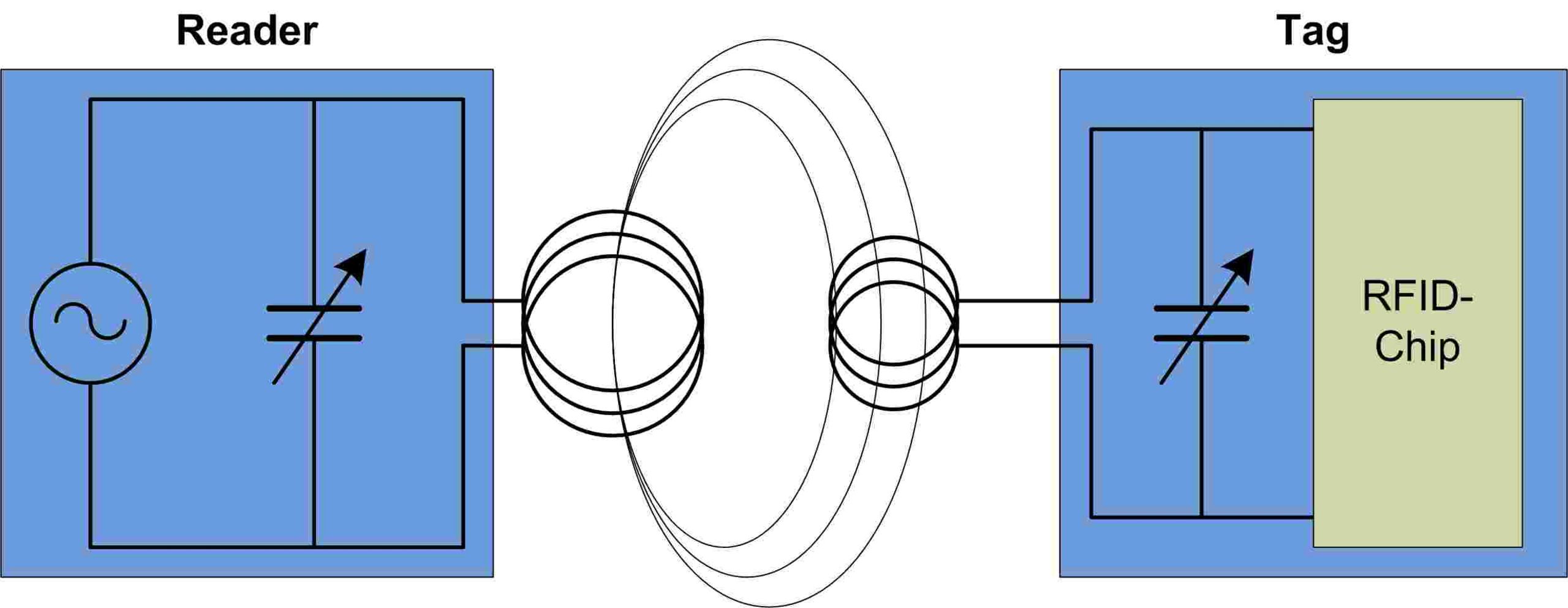
To meet the needs of powering the batteryless sensor and of ensuring a reliable data communication link to the outside the RFID technologies in either the HF or UHF frequency bands offer a good approach [1]. UHF has a greater maximum range in the classical RFID applications but the antenna design is strongly influenced by the surrounding materials and the energy transfer is not very efficient at longer distance ranges. Therefore, the choice was made for the HF-RFID based on inductive coupling (Figure 1). The HF-RFID technology is well known from access control, item management in warehouses or contactless credit cards. The transponder, more precisely called tag, harvests the power from an electromagnetic field induced by the reader device. At the same time a bidirectional data communication is established through the electromagnetic field. The worldwide RFID standard ISO 15693 at 13.56 MHz was selected. Due to the relative low frequency it is possible to maintain a reliable link even if the concrete contains some moisture or water film on the surface. On reader and tag side a tuned loop antenna is used for coupling.
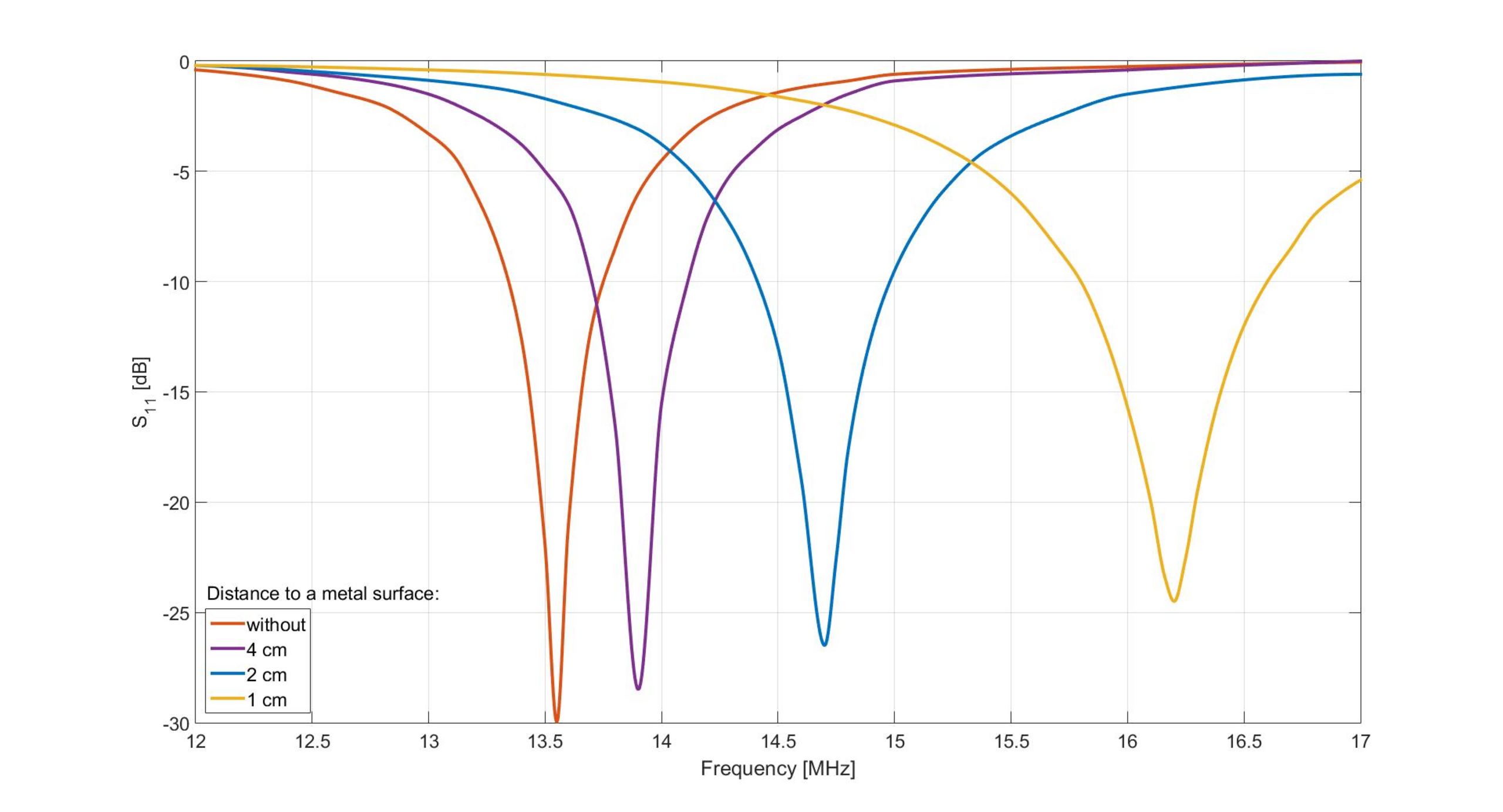
For the development of the system there where two main challenges as a result of the reinforced steel surrounding the RFID tag antenna. Firstly, metal objects near the loop antennas create eddy currents and reduce the inductivity value of the loop. As a result, the resonance frequency is shifted from 13.56 MHz to higher frequencies and the efficiency of the energy harvesting decreases by reducing the maximum operating range significantly. Secondly, also the Q-factor of the tuned antennas is reduced due to eddy current losses. Both can be measured by the |S11| parameter of the tuned antenna with a network analyser (Figure 2). The sensitivity is reduced by 100 % x 10|S11|/10. A detailed explanation of the effect with measurements over a metal plate can be found here [2]. Depending on the amount of reinforced steel that is being used, the detuning can be compared to that of a metal plate. The detune influences mostly the bigger reader antenna. The smaller tag antenna often can be placed with enough space from any metal into a free space between the reinforced steels. The detuning of the antennas can be compensated by trimming the capacity which is part of the resonant circuit loop antenna design (Figure 1). The tuning process needs to be done only once per application and can then be fixed for all sensors placed in similar environments. For the reader antenna manual or auto-tuning is possible to correct the detuning.
Energy source for the passiv sensor
A reliable, robust energy transfer and an efficient energy harvesting are essential. This implies besides the diode rectifier with a good efficiency and low output resistance, the correct antenna design and a tuneable resonance frequency. In order to achieve a portable and practical reader device, the antenna size should not be big and heavy and the transmission power should not be more than 2 W, thereby the reader can be powered from a battery pack.
One of the main questions in RFID applications are the right antenna sizes and the transmit power. This depends partly on the practical limits of the application, e.g. portable reader size, battery operation, sensor volume. But it also depends on physical constraints given from the magnetic coupling factor and from the sensitivity of the RFID sensor interface.
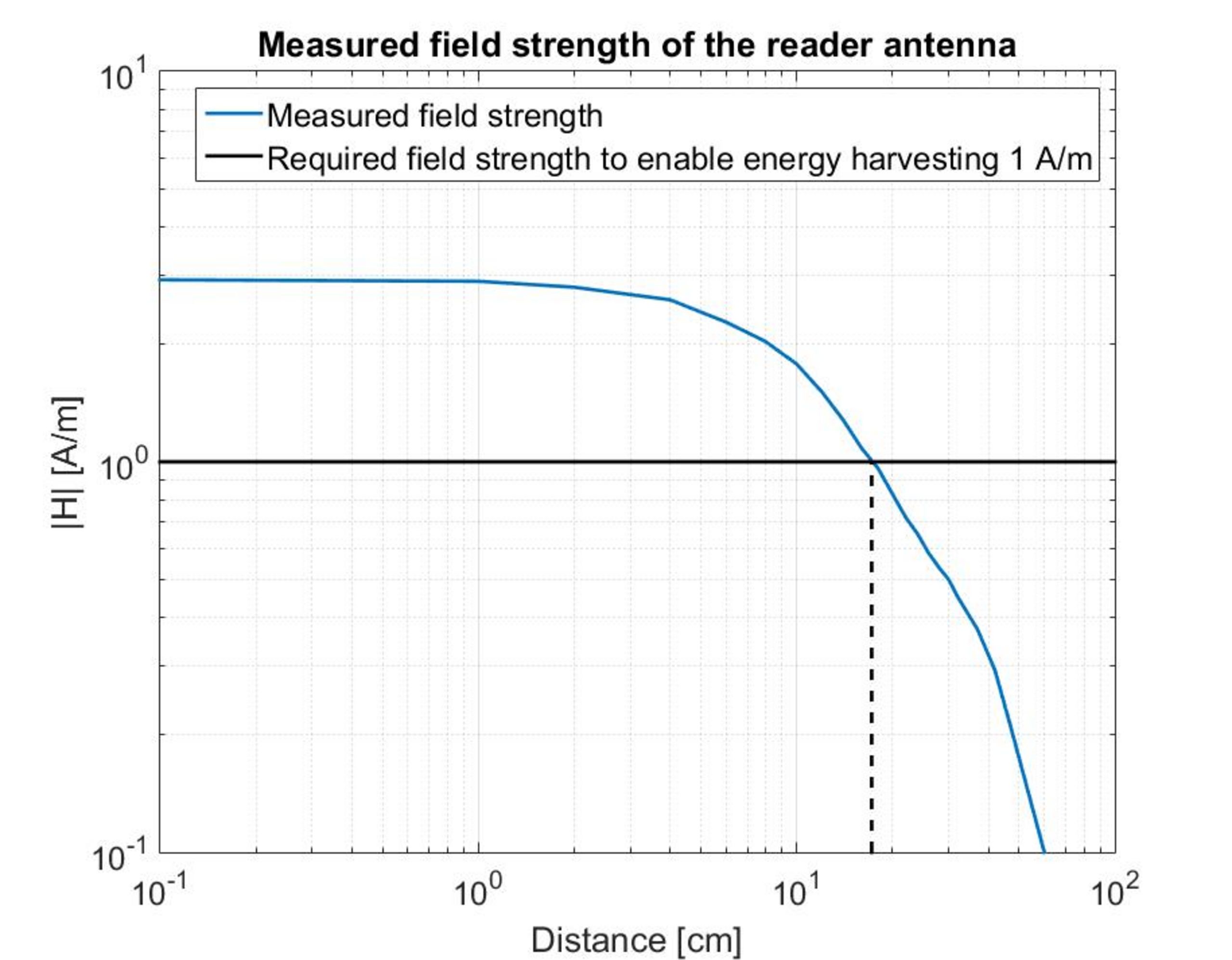
The coupling factor theory reveals that the H-field has a more or less constant region up to the radius of the reader antenna. At the distance of this radius along the antenna axis the H-field decays about
9 dB [3]. Further away the field strength decays very rapidly with 60 dB/decade and is not useful. The level of the field strength at the sensor tag antenna depends on the transmit power and the radius of both antennas. Making the reader antenna bigger, or the tag antenna smaller automatically means more transmit power to reach also the bigger distance. In figure 3 the magnetic field strength was measured with the final setup, and as one can state, is 3 A/m at a low distance and approx. 1 A/m at 18 cm. The knowledge and experience for an appropriate solution to the present problem comes from the long-time research activity at the ZSN [3].
A useful size of the reader loop antenna was found to be less than 40 cm in diameter. Furthermore, the size of the RFID sensor antenna (dmsTag) should be less than 10 x 5 cm. Otherwise it would be difficult to place the dmsTag with enough space from the surrounding metal and the imperfection area in the building structure would be too big.
To keep the component count on the sensor PCB as low as possible, a type of RFID transponder with integrated rectifier and voltage regulator is being used. Various RFID transponders are available on the market and have been evaluated in the dmsTag. Maxim has recently launched an interesting RFID transponder, the MAX66242, which has an on-board rectifier and voltage regulator that also outputs energy at low electromagnetic field strengths.
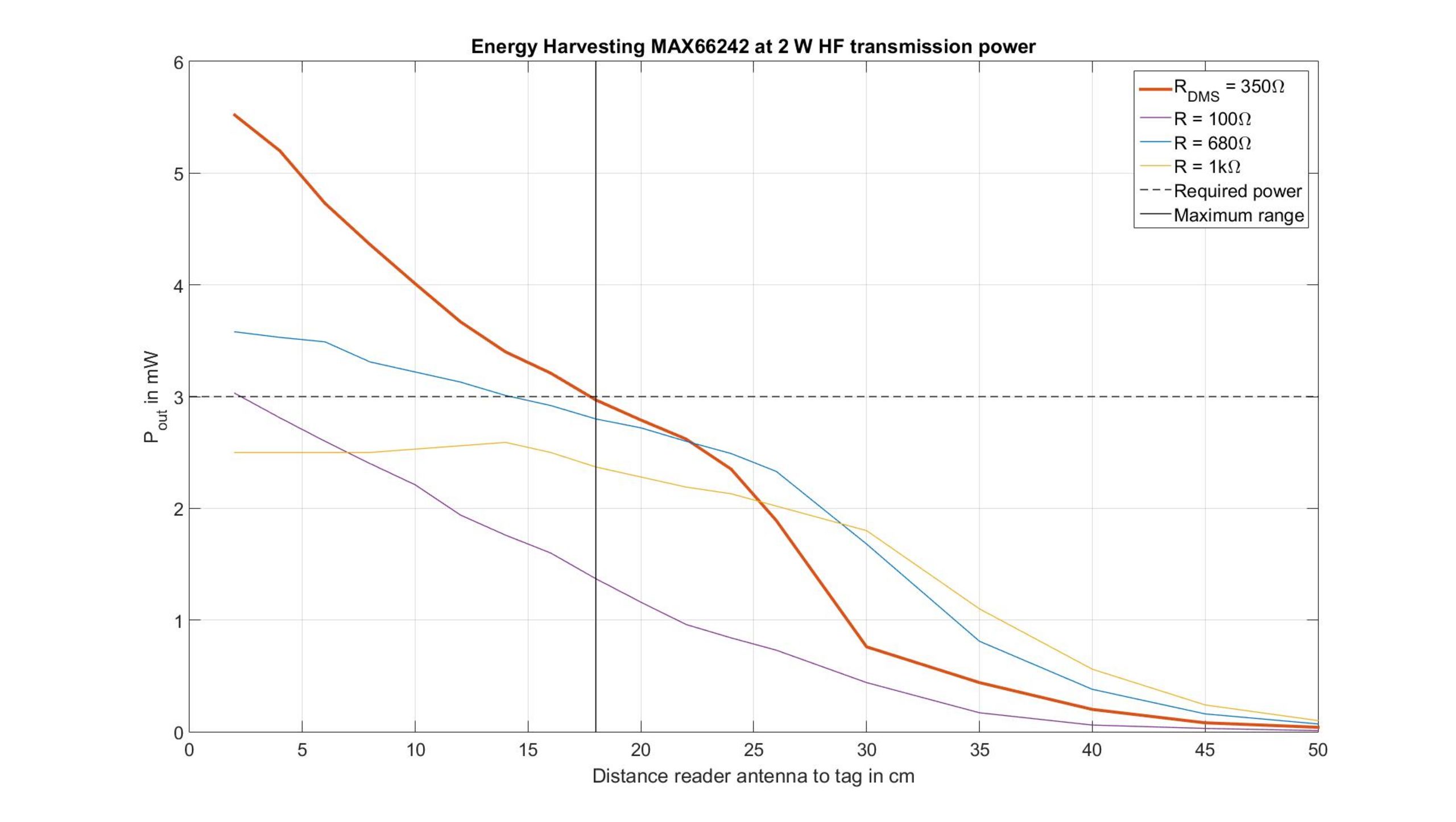
The powering concept of the dmsTag is very important because the harvesting output also has to supply sufficient energy to drive the low resistance (350 Ω) strain gauge, the analog front-end and a microcontroller. The maximum desired measuring rate was specified to be 100 Hz with a high measuring accuracy. As a consequence, the power supply constantly has to be able to deliver 1 mA at 3 V supply voltage. This constant power output of 3 mW is quite high for passive RFID applications. In order to get 3 V at the harvesting output of the MAX66242, a field strength of 1 A/m needs to be present according to the datasheet.
To get the above-mentioned amount of power out of the RFID chip, it is essential to optimize the coupling factor following the radiuses of the two antennas with 2 W of transmission power. For the transmission antenna simulations showed an optimal size of 30 x 30 cm and for the receiver antenna on the dmsTag a size of 5 x 5 cm is ideal. The theoretical operation range of the RFID sensor embedded in concrete are expected to be 18 cm with 2 W transmission power. This limit can also be seen in
figure 4, which shows the output power of the MAX66242 as a function of the distance between the reader antenna and the RFID sensor for different loads. The practical tests show with the completed dmsTag that a maximum distance of 15 cm can be achieved. The RFID chip itself responds to inventory requests from the reader with its ID by a working distance of up to 40 cm. This higher range can be used to localize the desired dmsTag which is embedded somewhere in the concrete and to optimize the position of the reader antenna above it.
Custom sensor electronics with off-the-shelf RFID-Reader
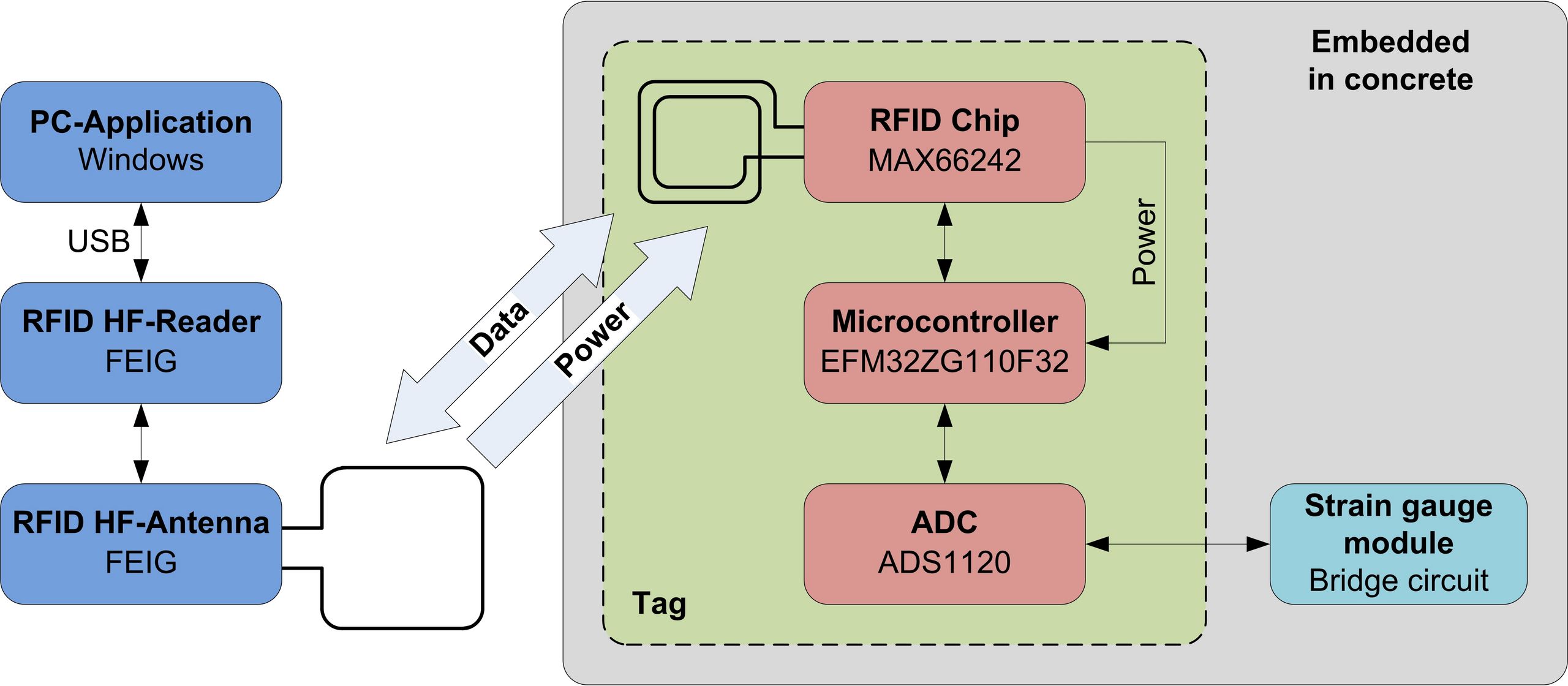
To convert the strain into an electrical signal, standard strain gauge modules from Tokyo Sokki Kenkyujo Co. with 350 Ω are being used. These modules offer strain gauges bonded directly on reinforced steel and moulded afterwards. Four-terminal sensing is used for the wired connection to the dmsTag. The circuit of the sensor electronics consists of two main parts (Figure 5). The analog front-end for small-signal sensors ADS1120 from Texas Instruments digitalises the input signal. The digital signal is then processed further and stored by the microcontroller in the dual interface memory of the RFID transponder chip MAX66242. A low power EFM32 Zero Gecko from Silicon Labs was chosen as microcontroller. Thus the goal of a compact circuit design was achieved by a low component count.
The conversion of the digitized input voltage to strain and to mechanical stress, is performed on the user side after reading the raw data through the RFID link. As each sensor has its own calibration factors, the calibration data for a linear correction of the measured data is stored on the dmsTag. While reading the strain values also the calibration data and the on board temperature on the sensor board can be read. These data can be used for linear correction and further processing of the measured strain samples.
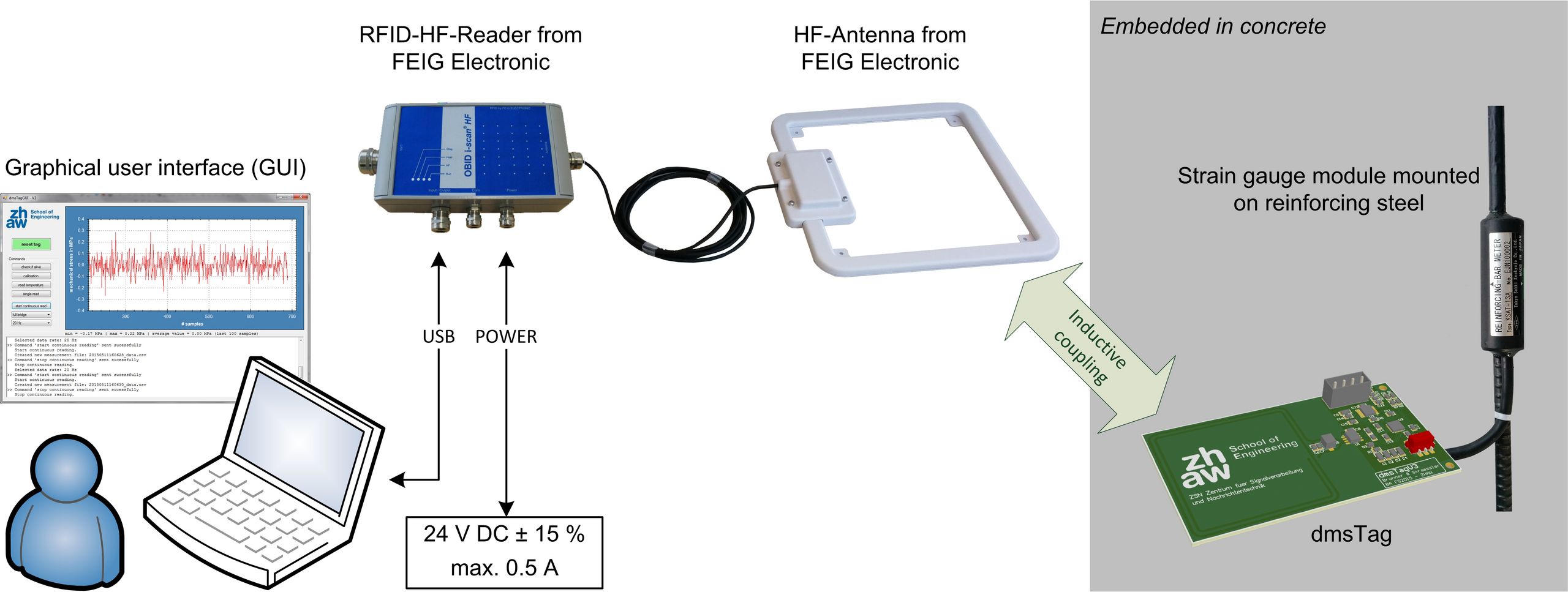
The RFID reader and the reader loop antenna are standard modules selected from the German company Feig Electronic. The RFID interface is realised with the MAX66242 which has a 4 Kbit dual-interface EEPROM, enabling the microcontroller on the dmsTag to access the memory by using an I2C bus interface. The complete data transfer from the RFID-sensor to the reader is managed through the EEPROM. A protocol with random handshake and data packet numbering was implemented. It is similar to the EPC Gen2 standard ID request protocol. The EEPROM is also used to store sensor specific calibration data directly on the tag. This ensures that the correct calibration data of that specific sensor module is available on-board of the dmsTag for future measurements. The operator can use a graphical user interface on PC for the control and measurement operation over the wireless RFID link.
Field testing
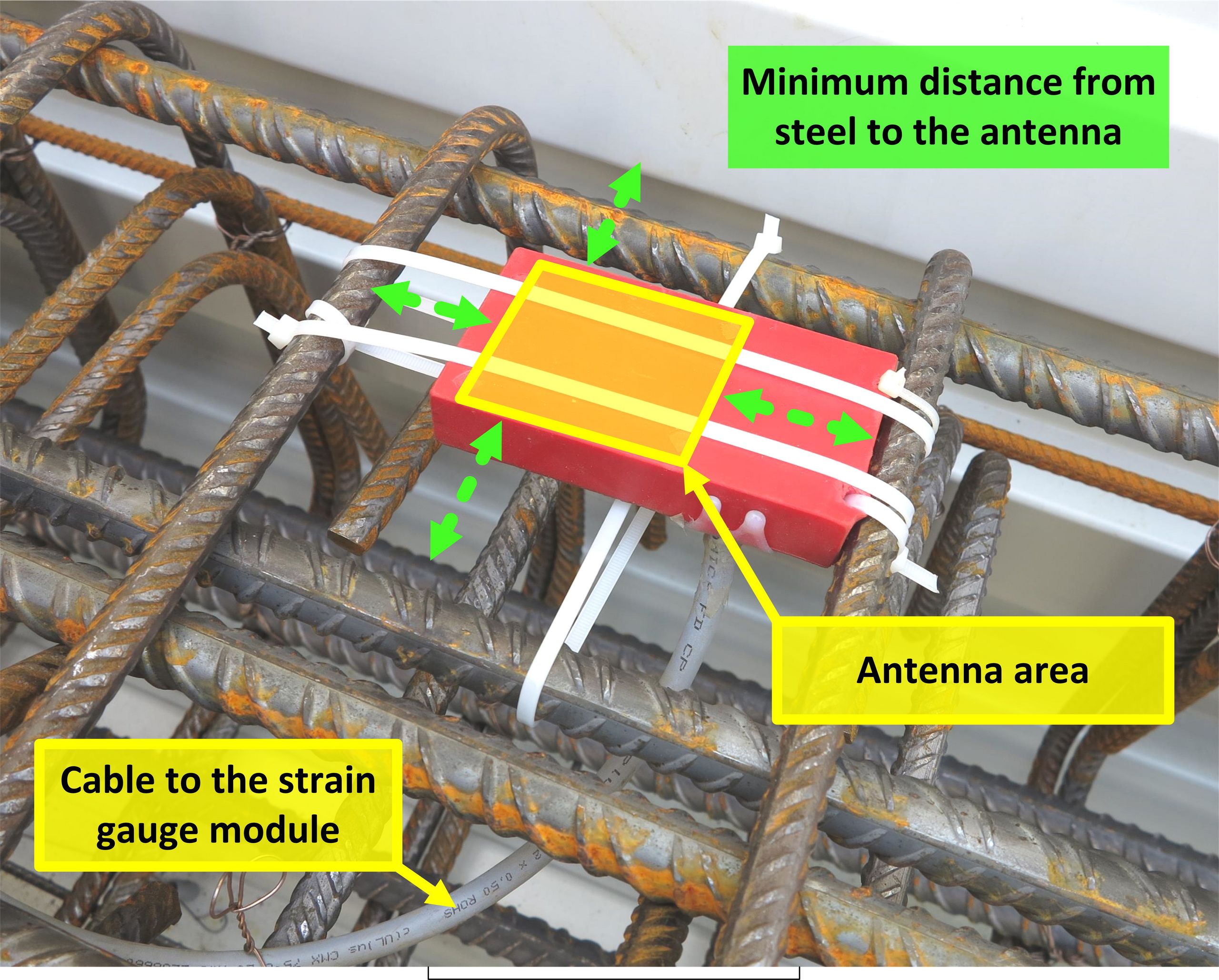
For the first field testing two dmsTags were placed in a newly built bridge. In order to protect the electronics from the alkaline etching process during the hardening of the concrete, it is necessary to mould the dmsTags with polyurethane compound. Polyurethane is resistant to water, oil, grease, acid and alkaline solutions. Furthermore, it is a good electrical isolator and can resist temperatures from -40 to +120°C. The RFID-sensor and the strain gauge module can be placed independently due to the cable in-between. On a bridge, for example, it is possible to place the strain gauge in the middle of the traffic lane while the electronic board with the RFID antenna is placed at the side of the lane. This allows a measurement of the strain while traffic passes. It is important to take attention during installation to the minimum distance of 5 cm to any surrounding metal. This ensures that the antenna mismatch is within the tolerance (Figure 7) and does not need to be retuned in-situ.
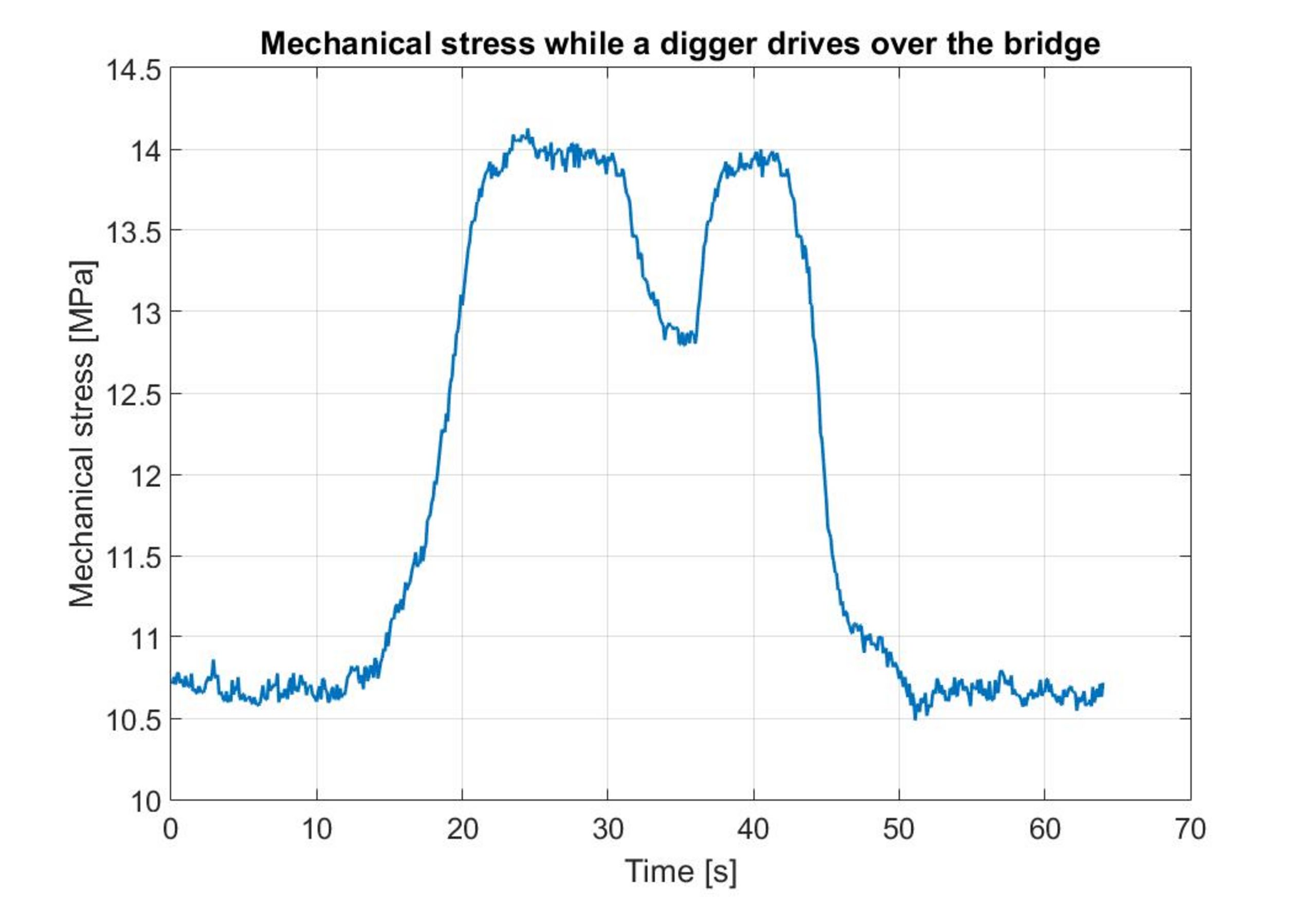
During a functional test, soon after the concrete solidified, the mechanical stress was captured while a road digger passed the sensor on the bridge (Figure 8). The two main peaks in the diagram are generated by the two axes of the digger who passed the strain gauge sensor subsequently. 1 MPa corresponds to a mechanical stress present in a 2 cm thick steel rod loaded with 300 N on one end. The dmsTag operates with a resolution of 0.2 MPa and has a dynamic range of ±1600 MPa. It is possible to measure and transfer data with a maximum rate of 100 Hz. This gives the possibility to carry out dynamic stress measurements.
The first field test for the monitoring of building constructions with passive RFID technology was successful. The results of the tests are promising, not only for that specific task but also for other comparable monitoring tasks.
Video

[1] Finkenzeller, K.: RFID-Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and near-Field Communication. WILEY, 2010, 3rd Edition, ISBN-10: 978-0-470-69506-7.
[2] Petrariu, A.; et.al.: Test Results for HF RFID Antenna System Tuning in Metal Environment. 13th International Carpathian Control Confer-ence (ICCC) 2012, 28. - 31.05.2012, confer-ence papers, page 543-546
[3] Kueng, R.; Philipp, S.: Drahtlos versorgt und abgefragt. www.elektroniknet.de/automation/technik-know-how/feldebene/article/28383/0/Drahtlos_versorgt_und_abgefragt/, (Date: 15.10.2015)
Publications
Brunner, Basil; Küng, Roland; Strässler, Daniel (2016). Monitoring of Building Constructions with Passive RFID Technology. In: Proceedings of the Wireless Congress 2016: Systems & Applications. Haar (Germany): WEKA FACHMEDIEN GmbH.
Brunner, Basil; Küng, Roland; Strässler, Daniel (2016). RFID-Sensoren im Beton
Elektronik, internet of things, Mai. 58-61.
Küng, Roland (2017). RFID-based sensors for construction 4.0. Conference: RFID & Wireless IoT tomorrow, Düsseldorf, 27.-28. September 2017. Download(PDF 2,7 MB)