Bachelorarbeit Maschinentechnik: Modellbasierte Flugreglerauslegung eines Quadrocopters
Einen Quadrocopter zum Fliegen bringen
Damit sich ein Quadrocopter ferngesteuert in der Luft bewegen kann, müssen seine vier Motoren über einen Regler korrekt angesteuert werden. Absolvent Mike Perschak hat im Rahmen seiner Bachelorarbeit im Studiengang Maschinentechnik eine solche Steuerung entwickelt.
Ferngesteuerte Flugobjekte wie Quadrocopter werden immer populärer. Nicht nur als privates Hobby, auch in verschiedenen wirtschaftlichen Branchen eröffnen sie neue Möglichkeiten. Gerade in der Filmindustrie sind die unbemannten Flugzeuge nicht mehr wegzudenken. In seiner Bachelorarbeit hat sich Mike Perschak am Institut für Energiesysteme und Fluid-Engineering (IEFE) mit den Grundlagen dieses Flugobjektsauseinandergesetzt. So hat er eine blosse Maschine bestehend aus Gehäuse und vier Motoren zu einem flugfähigen, ferngesteuerten Quadrocopter entwickelt. Dazu hat Mike Perschak seine im Studium erlernten Fähigkeiten in Steuer- und Regeltechnik praktisch angewendet.

Mathematische Modellierung
«Um einen funktionierenden Regler zu entwickeln, sollte man seinen Einsatz zunächst einmal simulieren», so Mike Perschak. Aus diesem Grund hat er ein mathematisches Modell hergeleitet, das die verschiedenen möglichen Flugzustände beschreibt: «Um das dynamische Verhalten des Quadrocopters komplett darzustellen, waren nicht weniger als zwölf Differentialgleichungen notwendig.» In einem nächsten Schritt hat der Absolvent dann die systemrelevanten physikalischen Parameter des Quadrocopters ermittelt – unter anderem den Schubfaktor der Propeller. Um die Motoren- und Propellercharakteristik festzulegen, hat MikePerschak eigens einen Prüfstand aufgebaut. Weitere notwendige Kenngrössen konnte er ermitteln, indem er ein CAD-Modell am Computer erstellte.
«Um einen funktionierenden Regler zu entwickeln, sollte man seinen Einsatz zunächst einmal simulieren.»
Mike Perschak
Regelung entwickelt und programmiert
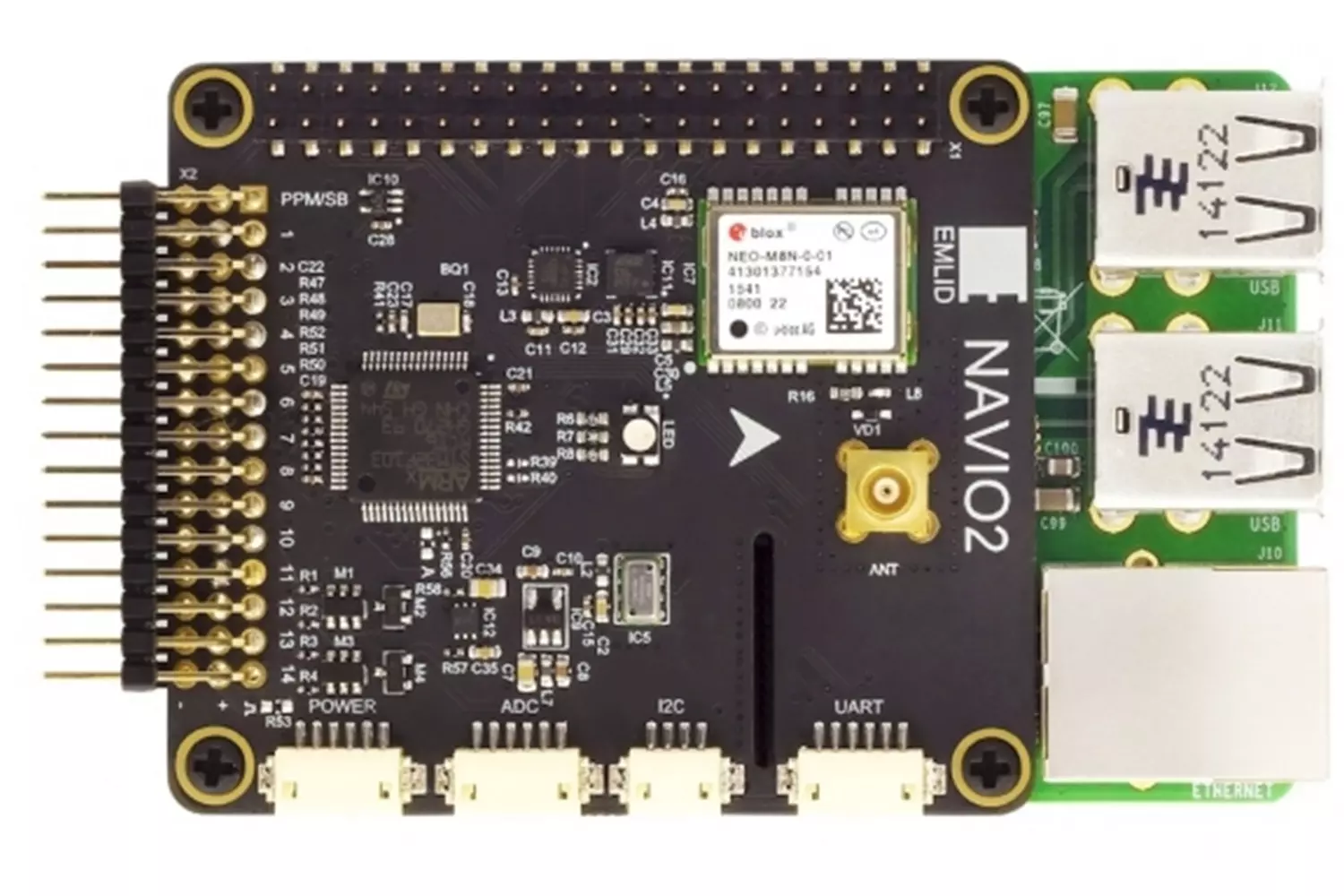
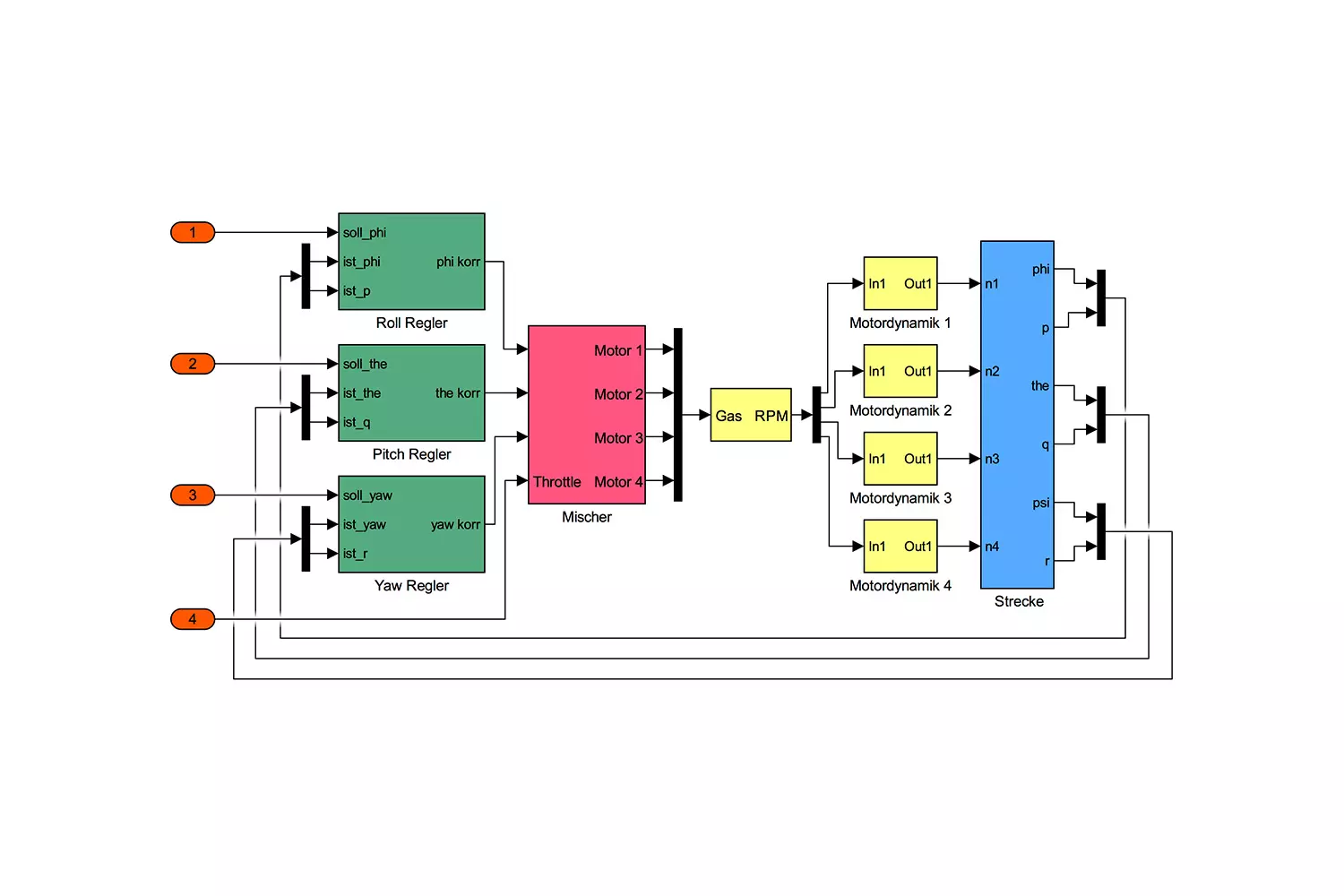
Um einen Regler für die Fluglage auslegen zu können, hat Mike Perschak das anfänglich komplexe Modell linearisieren müssen: «Die Simulation mit einem PD-Regler hat die besten Resultate erzielt.» Mit den gewonnen Erkenntnissen hat sich der Absolvent daran gemacht, die sogenannten Device Driver Blocks zu erstellen. Dazu hat er die Software MATLABSimulink ® verwendet. «Ich habe neue Simulink®-Blocks entwickelt, die zusammen das Herz des Reglers bilden», so Mike Perschak. «Ein Block liest die Kommandos der Fernbedienung, ein Block liest die Werte der Sensoren – also Beschleunigungen und Winkel – und der dritte Blockbestimmt schliesslich die Drehzahl der Motoren.» Sein entwickelter Regler in Simulink® wird schliesslich in C-Sprache übersetzt, kompiliert und drahtlos auf den Einplatinen-Mikrocontroller Raspberry Pi übermittelt.
Grundlage geschaffen
Abschliessend hat Mike Perschak das reale Modell mit der Simulation im geschlossenen Regelkreis verglichen. «Die Gegenüberstellung weist ähnliche Kurvenverläufe auf, wenn auch nicht alle Endwerte in abrupten Sollwertänderungen erreicht werden», so Mike Perschak selbstkritisch. «Ein geübter Quadrocopterpilot kann aber mit der Steuerung problemlos umgehen.» Mike Perschak sieht seine Bachelorarbeit als Grundlage für weitere Projekte. Maschinentechnik-Studierende, die sich wie er in Automation und Regeltechnik vertiefen wollen, könnten in künftigen Semestern seine entwickelten Blocks weiterverwenden, was den Programmieraufwand deutlich verringert.
Weitere Informationen
Infotage und Anmeldeschluss Bachelorstudiengänge
Infoveranstaltungen
- Samstag, 09.11.2024 (Infotag Bachelorstudium)
- Dienstag, 26.11.2024 (Online-Infoabend Bachelorstudium)
Anmeldung zum Bachelorstudium
Das könnte Sie auch interessieren
Aufnahmebedingungen
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Studiumsvorbereitung
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.
Anmeldung zum Bachelorstudium
Aufnahmebedingungen
Studiumsvorbereitung
Melden Sie sich jetzt zum Bachelorstudium an.
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.