Bachelorarbeit Informatik: Intelligente Vision für Würstchenbrat-Roboter
Für den Durchblick beim Würstchenbraten
Gemeinsam mit einem Team von Systemtechnik-Absolventen haben Michael Suter und Bruno Zimmermann einen Würstchenbratroboter entwickelt. Die Teilaufgabe der beiden Informatik-Absolventen bestand darin, dem Roboter beizubringen, wie er die Würstchen auf dem Grill erkennt.
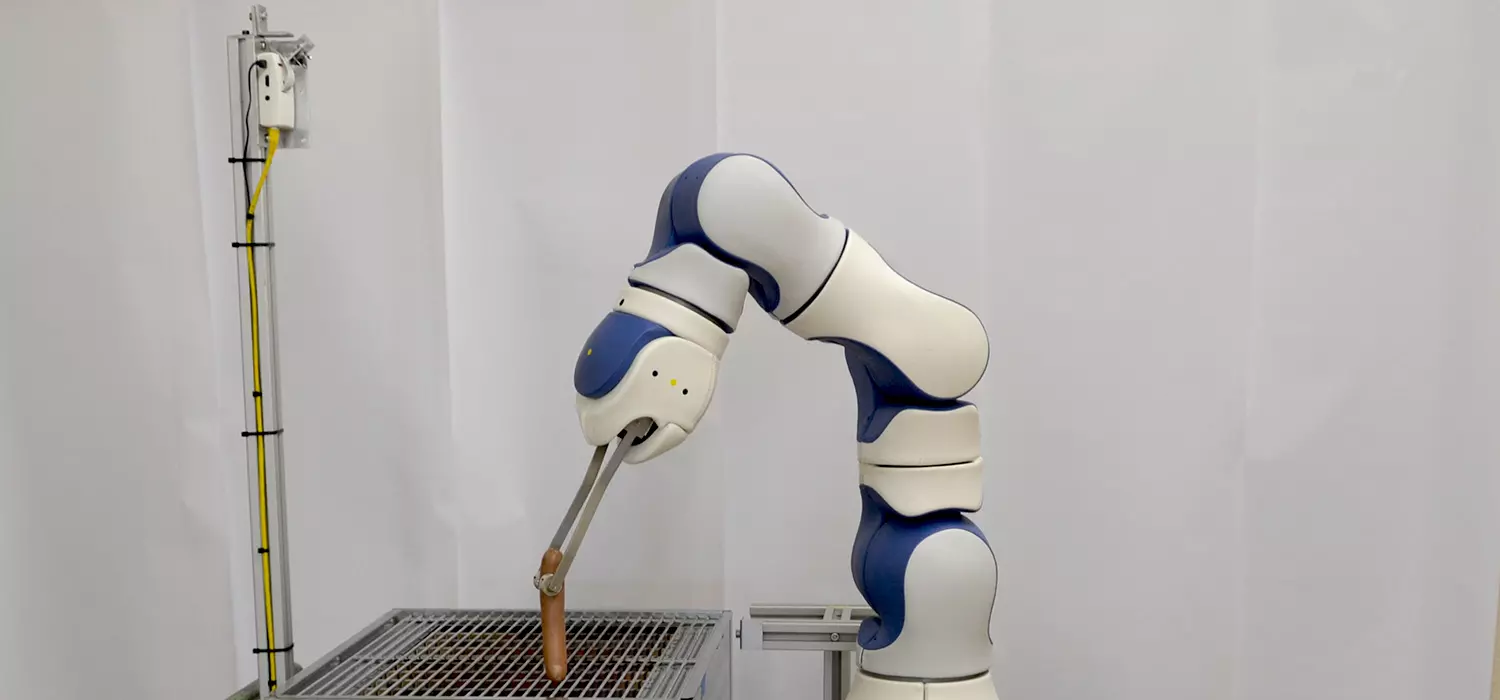
Für menschliche Grillmeister gibt es mittlerweile Grillzangen mit eingebauter Taschenlampe – für den Fall, dass die einbrechende Dunkelheit das Auffinden der Würstchen auf dem Rost erschweren sollte. Was uns nur unter gewissen Bedingungen Mühe bereitet, ist für Roboter ein ganz grundsätzliches Problem. Genau damit haben sich die beiden Informatik-Absolventen Michael Suter und Bruno Zimmermann in ihrer Bachelorarbeit auseinandergesetzt. Ihre Aufgabe: Einen Würstchenbratroboter mit einer intelligenten Vision ausstatten und so garantieren, dass der Roboter die Würstchen auf dem Grill erkennen, lokalisieren, ergreifen, wenden und auf den Teller legen kann. Das System besteht aus drei Komponenten: Kamera, Bildverarbeitung und Roboterarm mit Greifer.
Kombination verschiedener Bildfilter
Die Kamera filmt den Grill mit den darauf liegenden Würstchen. Das System kann aufgrund der Bilder aber nicht ohne weiteres erkennen, was Grill und was Würstchen ist. Hier kommt die Bildverarbeitung ins Spiel: Die Kombination verschiedener Bildfilter erlaubt es dem Roboter, zwischen Grill und Würstchen zu unterscheiden. Weil die Farbinformationen der Bilder eher unzuverlässig sind – Würste können aufplatzen, dunkler oder heller sein, der Grill kann je nach Sonneneinstrahlung mehr oder weniger reflektieren – haben sich die Absolventen vor allem auf Informationen zu den Formen gestützt. «Dabei haben wir dem Roboter eigentlich nicht beigebracht, Würstchen zu erkennen, sondern genau umgekehrt: Der Roboter erkennt den Grill und subtrahiert diese Bildbestandteile. Was dann noch übrig bleibt, sind die Würstchen.»
«Der Roboter erkennt den Grill und subtrahiert diese Bildbestandteile. Was dann noch übrigbleibt, sind die Würstchen.»
Bruno Zimmermann
Zange mit kleinen Drehtellern
Weil sämtliche Komponenten fix installiert sind, kann das System aufgrund der umgerechneten Bildinformationen dem Roboterarm genau übermitteln, wo er zugreifen muss. Die Greifer für diesen Roboterarm wurden in einer zweiten Bachelorarbeit im Studiengang Systemtechnik entwickelt. Am erfolgversprechendsten erwies sich ein System mit kleinen gezackten Drehtellern auf jeder Seite der Greifzange. Ergreift die Zange die Würstchen, fallen diese dank der Schwerkraft in eine vertikale Position; mit einer ab- und rückwärtsgerichteten Bewegung werden sie einfach und elegant auf die andere Seite gelegt. Auch das Auflegen der Würste auf den Grill und das Servieren auf den Teller übernimmt der Roboter selbstständig. Eine Zeitschaltuhr sorgt dafür, dass die Würste nicht verkohlen.
Wirtschaftlicher als ein echter Grillmeister
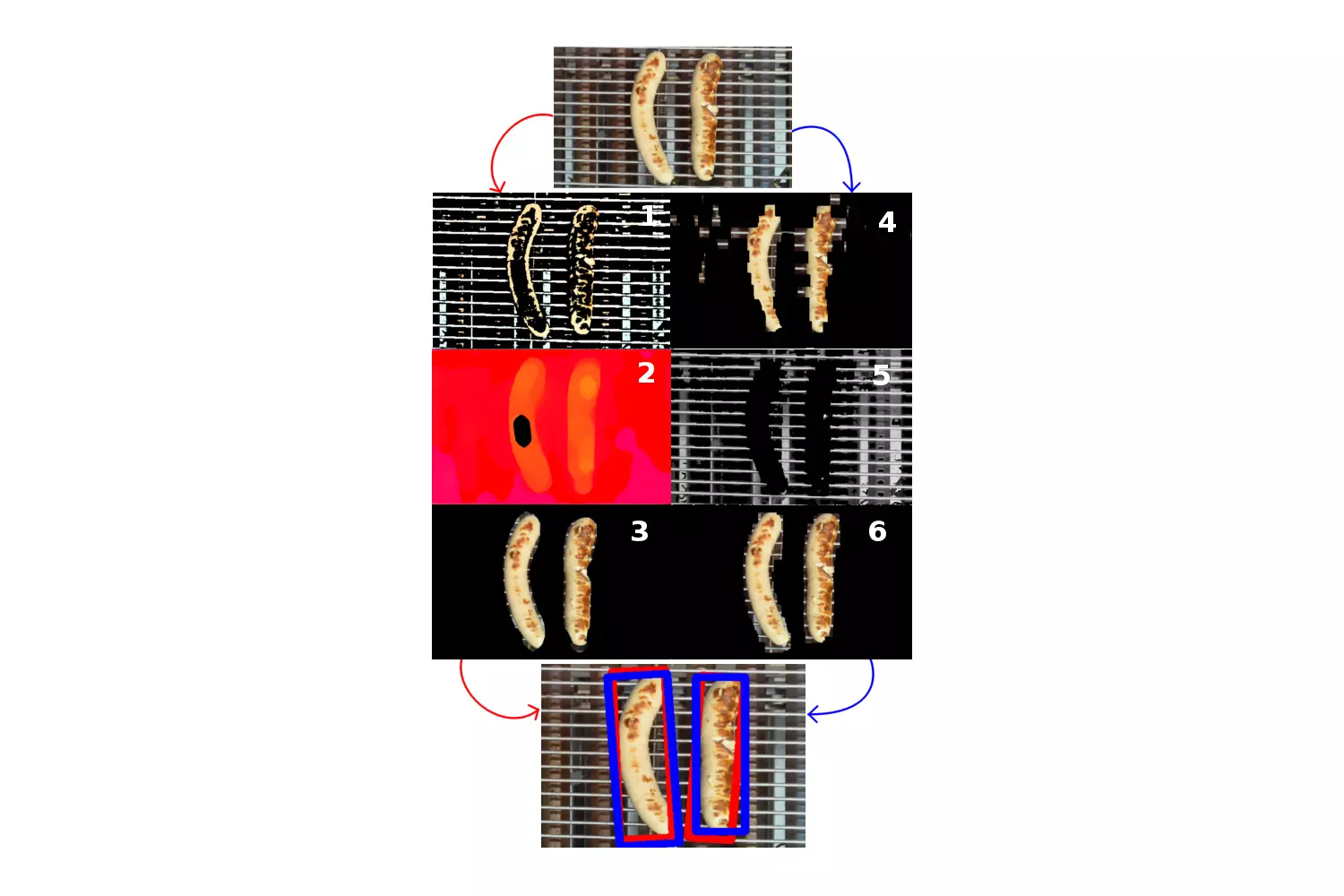
vom Kamerabild subtrahieren (3+6).
Die interdisziplinäre Arbeit ist mehr als eine technische Spielerei für den nächsten Grillsommer. Dozent Hans Doran erklärt: «Aufgrund des hohen Lohnniveaus in der Schweiz und der geringen Marge lohnt es sich heute kaum mehr, bei einem Volksfest die Bratwürste von Menschen braten zu lassen. Da liegt die Idee unseres Industriepartners nahe, einen Roboter einzusetzen.» Dabei war die Vorgabe nicht primär einen besonders effizienten Roboter zu entwickeln, der möglichst viele Würstchen in kurzer Zeit brät. «Die Idee war vielmehr, einen Roboter zu konstruieren, der die Aufgabe möglichst ähnlich wie Menschen löst. So bleibt ein Teil des traditionellen Charakters erhalten – ergänzt durch einen gewissen Show-Effekt», so Bruno Zimmermann.
Infotage und Anmeldeschluss Bachelorstudiengänge
Infoveranstaltungen
- Samstag, 09.11.2024 (Infotag Bachelorstudium)
- Dienstag, 26.11.2024 (Online-Infoabend Bachelorstudium)
Anmeldung zum Bachelorstudium
Das könnte Sie auch interessieren
Aufnahmebedingungen
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Studiumsvorbereitung
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.
Anmeldung zum Bachelorstudium
Aufnahmebedingungen
Studiumsvorbereitung
Melden Sie sich jetzt zum Bachelorstudium an.
Die Aufnahmebedingungen für das Bachelorstudium an der ZHAW School of Engineering.
Erfahren Sie, wie Sie sich optimal auf das Bachelorstudium vorbereiten können.